7.5.5. 부가축 파라미터 설정
7.5.5. 부가축 파라미터 설정
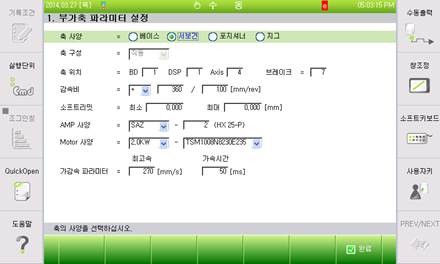
그림 7.87 부가축 파라미터 설정
l 로봇 이외에 부가축을 사용하는 경우 이 메뉴에서 설정합니다. 부가축은 로봇의 베이스축(주행축), 서보건축, 포지셔너축, 지그축과 서보핸드 축이 있습니다. 이와 같은 부가축의 사양 및 구성등을 설정합니다. 상세 내용은 『부가축 기능설명서』를 참조 바랍니다.
그림 7.87 부가축 파라미터 설정
l 로봇 이외에 부가축을 사용하는 경우 이 메뉴에서 설정합니다. 부가축은 로봇의 베이스축(주행축), 서보건축, 포지셔너축, 지그축과 서보핸드 축이 있습니다. 이와 같은 부가축의 사양 및 구성등을 설정합니다. 상세 내용은 『부가축 기능설명서』를 참조 바랍니다.