7.5.7. 유닛 설정
7.5.7. 유닛 설정
유닛이란 작업프로그램으로 움직일 축의 조합을 설정하는 것입니다. 이 대화상자에서는 각 유닛을 메커니즘의 조합으로 다양하게 설정할 수 있습니다.
메커니즘은 각 축의 조합이므로 유닛도 결국 각 축의 조합입니다. 다만 메커니즘은 조그시에 사용하고 유닛은 프로그램에서 스텝 위치를 기록에 사용하는 점이 다릅니다. 일반적인 상태에서 유닛은 유닛#0로 설정되어 있습니다. 이것은 모든 메커니즘을 포함한 상태가 되기 때문에 모든 축이 포함됩니다. 이 상태에서 로봇 프로그램을 기록할 경우 모든 축의 위치가 기록되며 재생시에도 전 축이 이 위치로 이동하게 됩니다.
만일 특정 메커니즘(축)만 운전되는 프로그램을 작성하길 원한다면 이 메뉴에서 유닛을 할당하여 사용합니다.
(1) 시스템의 유닛 변경은 제어기 동작에 큰 영향을 미치기 때문에 엔지니어 만이 설정을 변경할 수 있습니다.
(2) 수동모드의 초기화면에서 『[F2]: 시스템』 → 『5: 초기화』→ 『7: 유닛 설정』을 선택합니다.
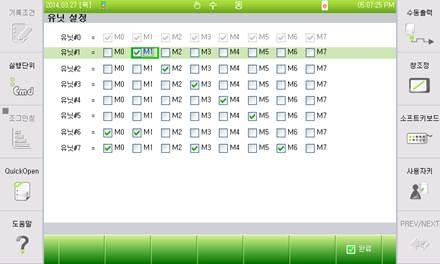
그림 7.89 유닛 설정
(3) 유닛 #0는 모든 메커니즘으로 고정되어 있습니다.
(4) 유닛 #1부터 #7은 사용자가 다양하게 메커니즘을 선택할 수 있습니다.
(5) 수동모드에서 프로그램의 스텝 기록시 사용자는 [유닛]키를 사용하여 유닛번호를 선택할 수 있으며, 유닛번호가 선택된 상태에서 [기록]키를 누르면 해당 유닛에 해당하는 축만 위치가 저장됩니다.
(6) 커서로 스텝을 변경하거나 실행에 의해 스텝이 진행되는 경우, 스텝에 기록된 유닛번호로 현재 유닛번호가 자동으로 변경됩니다.
(7) 기록된 스텝에서 [위치수정]키를 누르면 스텝에 저장된 유닛의 위치가 수정됩니다.

l 유닛에 관련된 다음과 같은 기능을 참고 바랍니다.
① 포즈변수의 유닛을 변경할 수 있습니다. (예, “P1.Unit=2”)
② 포즈상수의 유닛도 지정할 수 있습니다. (예, “P1=(12.00,13.00)UNIT2”)
③ 작업프로그램을 PC에서 보면, 숨은 포즈에 유닛이 포함되어 있습니다.
(예, “S3 MOVE, P,S=50%,A=0,T=0 (12.00,27.00)UNIT2”)
(유닛이 0인 경우에는 UNIT0가 포함되지 않습니다. )
l 로봇 좌표계 보간(interpolation) 기능
(1) 기능 사용 조건:
① 주행축이 있는 시스템에서 주행축을 포함하지 않은 유닛을 설정하고 스텝의 좌표계가 ‘로봇’으로 설정되어 있어야 합니다.
② 주행축을 포함한 스텝(베이스 좌표계 보간만 지원)과 주행축을 포함하지 않은 스텝(로봇 좌표계 보간만 지원)을 구분하여 처리합니다.
(주행축이 없는 시스템은 해당사항 없음.)
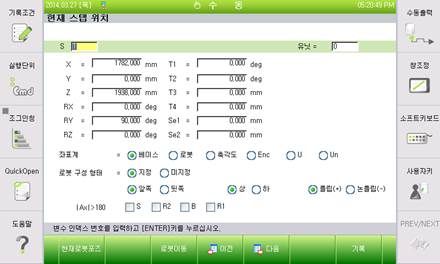
그림 7.90 스텝의 로봇좌표계 설정
(2) 기능 설명:
① 스텝의 유닛이 ‘로봇’단독으로 설정된 경우
- 좌표계가‘로봇’ 혹은‘축각도’로 기록된 경우
è 직선 보간 (L)과 원호보간(C)을 로봇 좌표계 기준으로 수행합니다.
- 좌표계가‘베이스’로 기록되어 있으면 플래이백 시 에러 처리합니다.
èE1483 스텝의 유닛과 좌표계 설정이 맞지 않음”에러가 발생합니다.
- 정치툴 보간, 컨베이어 동기, 포지셔너 동기 기능은 실행이 불가합니다.
è“E1484유닛 설정 오류 – 동기 기능 사용 불가”에러가 발생합니다.
② 유닛이 ‘All 주행축+로봇’인 경우
- 좌표계가‘베이스’ 혹은‘사용자 U, Un’로 기록된 경우
è L, C보간을 지정된‘베이스좌표계’ 혹은 ‘사용자좌표계’로 보간합니다. 로봇 좌표계 보간(L, C)은 지원하지 않습니다.
- 단, 유닛이 ‘주행축+로봇’인 경우는 모든 주행축이 유닛에 포함되어 있는 경우입니다. 주행축이 여러 개일 때는 모든 주행축을 유닛에 포함시켜야 합니다. 그렇지 않으면 ‘로봇’단독일 경우와 동일하게 간주됩니다.
(3) 기능의 활용 방법
① ‘멀티태스킹’ 기능이나 ‘명령문 독립실행’ 기능을 사용하여 주행축을 독립적으로 운전하는 경우에도 로봇좌표계로 L, C 보간하여야 운전이 가능합니다.
② 유닛 기능 활용으로 로봇 좌표계 P, L, C 보간이 가능합니다.
- 서보건, Eqless건 지원
- 쉬프트 기능 지원
③ 프로그램을 직관적이고 단순하게 작성할 수 있습니다.
- 베이스 축만 쉬프트하여 동일 작업을 수행하는 프로그램의 작성이 용이하게 됩니다.
- 베이스 축의 위치에 관계없이 건서치를 수행하고자 하는 프로그램의 작성이 용이하게 됩니다.