7.5.8. 부가축 위치 동기 파라미터 설정
7.5.8. 부가축 위치 동기 파라미터 설정
2개의 부가축들이 항상 동일한 위치로 함께 움직이도록 하는 부가축 위치 동기 기능에 대한 파라미터들을 설정 합니다.
부가축 위치 동기를 유효로 설정하면 지정된 부가축들 간의 위치를 소프트웨어적으로 항상 동기하여 움직이게 됩니다. 따라서 동기기능을 유효화 하기 전 동기 하고자 하는 부가축들을 물리적으로 정렬한 상태에서 축 원점 설정을 통해 소프트웨어적으로 동일한 위치로 인식 할 수 있도록 해야 합니다. 또한 동기하고자 하는 축들의 물리적인 이동 방향이 같은 방향이 되도록 설정 되어야 합니다.
부가축 위치 동기기능은 최대 2쌍의 부가축들 간의 위치 동기를 지원 합니다. 각 쌍은 아래 설정 화면에서 좌측열과 우측열에 지정된 부가축들이 동기 하게 됩니다. 동기 축 번호는 부가축의 번호이므로 로봇 축을 제외한 몇 번째 부가축인지를 입력 해야 합니다. 또한 좌측 열의 부가축 번호가 우측열 보다 낮은 번호로 설정 되어야 합니다. 부가축 번호 설정 시 좌/우 측열의 설정된 축 번호를 기준으로 입력가능한 범위를 검사하고 있으므로 화면 하단의 가이드 메시지를 확인하며 설정하는 것이 좋습니다. 부가축의 개수가2축 이상이고 두번째 이상의 부가축 간의 위치 동기를 사용하고자 하는 경우 우측 열을 먼저 설정하고 좌측열을 설정하셔야 합니다.
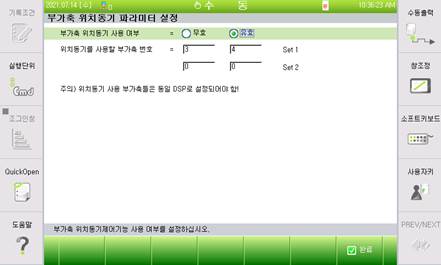
그림 7.91 부가축 위치동기 파라미터 설정

l 부가축 동기 기능을 통해 동기 할 수 있는 부가축들은 동일한 DSP 칩셋에 연결되어 있어야 합니다.
l 동기하고자 하는 부가축들은 축의 사양, 구성, 속도, 가속시간이 일치 해야 합니다.
l 부가축 동기 기능이 설정된 이후에는 각각의 축을 개별적으로 움직일 수 없으며 조기키도 하나의 축으로 할당 되게 됩니다.
l 비상정지 또는 서보 에러 등, 기타 요인에 의해 동기축들의 위치에 오차가 발생하는 경우 모터 온 시점에 2개 축의 중간 지점으로 이동해 다시 정렬하게 됩니다.