7.6.1. 축 원점 및 툴 길이 최적화
7.6.1. 축 원점 및 툴 길이 최적화
로봇의 각축의 원점 및 툴 길이를 외부 측정센서를 사용하지 않고 캘리브레이션 하는 기능입니다.
교시 방법은 아래의 그림과 같이 뾰족한 팁을 두개를 준비하여 하나는 외부에 고정하고 하나는 툴에 고정한 후 외부 고정 팁에 대해 로봇의 툴 끝을 자세만 변화시키는 방법으로 여러 점 로봇 프로그램으로 기록하는 것입니다.
이때 축 원점과 툴 길이를 모두 찾아낼 경우는 7점, 툴 길이만 찾아내는 경우에는 4점 이상을 교시해야합니다.
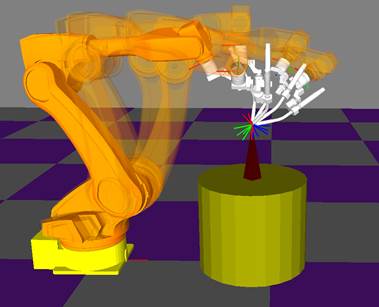
그림 7.90 축 원점 및 툴 길이 최적화 기능 교시 방법
이 기능을 사용하면 CAD데이터가 없는 툴 길이 X, Y, Z뿐만 아니라 로봇 H, V, R2, B축의 원점을, 최적화 방법을 이용하여 찾아냅니다.

l 본 기능을 사용하면 엔코더 옵셋 및 툴 길이가 변경되어 기존에 교시된 프로그램의 작업위치가 변경되므로 반드시 작업하기 전에 수행하여야 합니다.
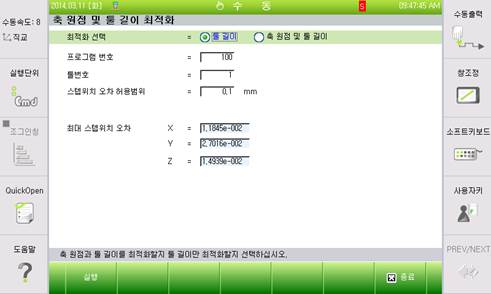
그림 7.91 축 원점 및 툴 길이 최적화 결과
n 최적화 선택
① 툴 길이
『[F2]: 시스템』→ 『3: 로봇 파라미터』 → 『1: 툴 데이터』에서 설정해야 하는 툴 길이 값이 자동으로 보정됩니다.
② 정수 및 툴
- 로봇의 원점 및 툴 길이를 모두 보정할 때 선택합니다. 통상적으로 로봇을 설치하고 최초에 정확한 원점을 설정하고자 할 때 사용합니다.
- 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『1: 툴 데이터』에서 설정해야 하는 툴 길이와 『[F2]: 시스템』→ 『3: 로봇 파라미터』 → 『2: 축 원점』에서 설정해야 하는 로봇의 원점이 자동으로 계산됩니다.
- 일단 로봇 원점이 정확히 설정되면 최적화 선택 방법을 ‘툴길이’로 선택하여 툴길이만 보정하십시오. ‘축 원점 및 툴길이’를 변경하는 경우 모든 로봇의 원점이 변경되므로 기존에 작성된 프로그램의 위치가 변경되므로 주의하십시오.
n 프로그램 번호: 동일점을 여러 가지 자세로 기록한 프로그램의 번호를 설정합니다.
n 툴 번호
자동 설정하려는 툴의 번호이며 설정용 프로그램에 기록되어 있는 툴 번호와 일치하여야 합니다.
n 스텝위치 오차 허용범위
자동 캘리브레이션 결과 예상되는 오차가 이곳에서 설정된 값보다 작은 경우 자동으로 정수 데이터를 갱신합니다. 만일 이곳에 설정된 값(초기 설정값 0.1mm)보다 큰 경우는 사용자에게 정수의 반영 여부를 확인한 후에 반영합니다.

l 본 기능에서 교시의 정확도는 최대 스텝위치 오차 결과의 정확성과 비례합니다. 따라서 가능한 뾰족한 두 팁을 준비하여 정확히 일치하는 교시 작업이 요구됩니다. 툴 끝과 공간상의 고정 점의 일치 정확도가 눈으로 확인할 때 0.5mm 이내가 되도록 합니다.
l 교시는 각 스텝의 자세가 유사하도록 하지 말고 이전 자세와 다른 자세(30deg이상 차이가 나도록)로 하십시오.
l 각 스텝에 대해 손목 축(R2, B, R1)을 가능한 한 크게 동작시키고 각 스텝간 손목 축 각도의 차이가 충분하도록(가능한 한 크게) 티칭하십시오.
l 기계 파라미터 파일(ROBOT.MCH)이 보호로 설정되어 있으면 본 기능을 실행할 수가 없습니다. 파일보호를 해제한 후 실행하십시오.