7.6.2. 포지셔너 캘리브레이션
7.6.2. 포지셔너 캘리브레이션
포지셔너(positioner) 캘리브레이션 기능은 로봇 외부에 설치된 지그 장치 동작에 동기화하여 로봇이 추종하거나 그 지그장치에 대해 상대적인 직선 혹은 원호 동작을 가능하게 하는 기능입니다. 포지셔너 캘리브레이션 기능에 적용되는 외부 지그 장치를 포지셔너라고 칭하며, 스테이션(station)이라고도 합니다.
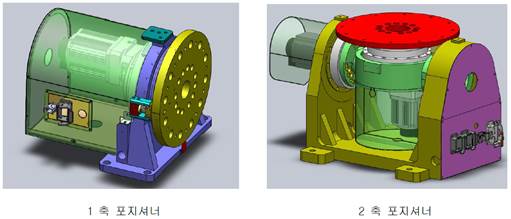
그림 7.92 1축, 2축 포지셔너
본 기능을 적용하면 로봇의 작업영역의 제한으로 인해 작업이 어려운 부분을 보완할 수 있습니다. 즉, 작업물이 포지셔너 위에 고정되어 있는 상태에서 포지셔너가 이동하더라도 로봇은 이 포지셔너의 움직임을 추종하면서 작업물 위에서 직선 또는 원호의 동작이 가능하도록 설계되어 있습니다.
주요 기능 사양은 아래와 같습니다.
표 7‑4 포지셔너 기능 사양
주요 기능 사양 | 특징 |
포지셔너 그룹 | 1~4 그룹 지원 |
포지셔너 축수 | 1축, 2축 포지셔너 지원(회전축) |
보간 방식 | 직선, 원호 보간 지원 |
외부입력 독립조그 (SELSTN) | 자동모드에서 선택된 포지셔너는 로봇과 무관한 조그 조작 기능 지원 |
외부입력 독립재생 (AXISCTRL) | 자동모드에서 선택된 포지셔너는 로봇과 무관하게 독립재생(MOVE)기능 지원 |
본 기능은 포지셔너 그룹이 설정된 상태에서 사용할 수 있습니다.
포지셔너의 좌표계를 설정하기 위해 1축 포지셔너의 경우는 3점, 2축 포지셔너의 경우에는 5점의 교시를 통하여 간단하게 포지셔너의 캘리브레이션이 수행됩니다.
자세한 내용은 『Hi5a 제어기 포지셔너 동기 기능설명서』를 참고하십시오.