2.11. 방폭 계획
2.11. 방폭 계획
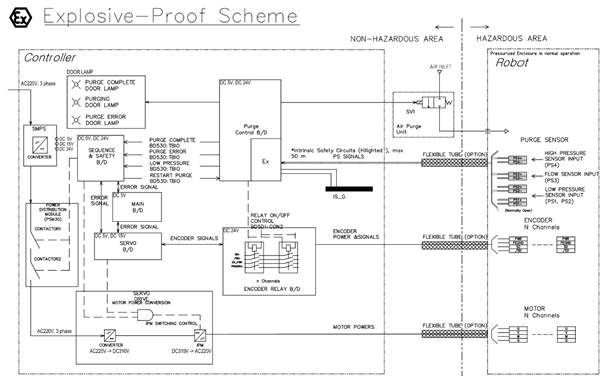
그림 2.18 방폭 계획
방폭 시스템은 다음과 같은 절차를 수행합니다.
(1) 제어기 전원이 켜지거나 리셋되면 에어 퍼지 프로세스가 시작됩니다.
(2) 퍼지 제어 보드의 압력 스위치 상태를 모니터링 합니다.
(퍼지 제어 보드의 EX 영역은 기본적으로 안전합니다.)
(3) 에어 퍼지를 완료하면 완료 신호를 TBIO 케이블을 통해 시퀀스 &안전 보드로 전송하고 릴레이 보드를 켭니다.
(4) 그러면, 시퀀스 & 안전 보드는 재어 신호를 서보 보드와 서보 드라이브 보드로 전송하여 로봇을 구동합니다.
서보 보드는 로봇의 엔코더를 제어합니다. 방폭을 위해 릴레이 보드는 엔코더 전원을 이중 채널로 처리합니다.
서보 드라이브 보드는 로봇의 모터를 제어합니다. 방폭을 위해 PDM(Power Distribution Module)(PSM30)은 접촉기 2개로 구성됩니다.
각 SMPS는 AC 220V를 DC ±5V, DC ±15V, DC ±24V로 변환하며 각 보드에 공급합니다. 5V, 24V용 SMPS는IEC 61010-1 인증을 받았습니다. 5V용 모델명은‘QUINT4-PS 5DC’이고, 24V용 모델명은 ‘QUINT4-PS 24DC’입니다.
(메인 보드에서 5V, 서보 보드에서 5V/15V, 시퀀스 & 안전 보드 및 퍼지 제어 보드에서 5V/24V, 엔코더 릴레이 보드에서 24V)
모터 제어를 위해서는 AC의 주파수 제어가 필요합니다. 그렇기 때문에, 서보 드라이브의 컨버터를 통해 AC 220V를 DC330V로 변경한 후 AC 주파수는 IPM이 제어합니다.