3.3. 메커니즘 설정
3.3. 메커니즘 설정
(1) 메커니즘 설정
『[F2]: 시스템』 → 『5: 초기화』 → 『6: 메커니즘 설정』을 선택합니다.

부가축은 수동 조작시 메커니즘 그룹에 따라 조그키를 할당하기 위해 메커니즘 그룹을 설정해야 합니다. 로봇축은 메커니즘 M0으로 고정되어 있으며, 부가축은 메커니즘 M1~M7로 분류하여 선택합니다.
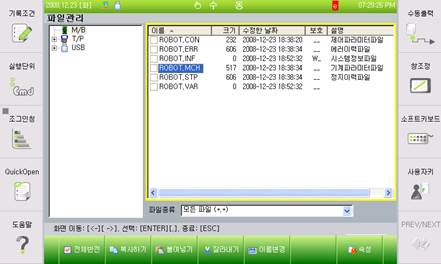
(2) 정수 파일 백업
부가축 설정이 완료되고 나면 『[F1]: 서비스』 → 『5: 파일관리』에서 USB memory에 정수파일(ROBOT.MCH)을 복사하거나 HRView를 사용하여 컴퓨터에 복사합니다.