2.4. 명령문 독립실행 설정
2.4. 명령문 독립실행 설정
본 기능을 사용하기 위한 조건을 사용자가 설정합니다. G1과 G2에 대한 팁드레싱 및 건서치 프로그램의 독립실행을 위해서는 TaskStart 명령문을, P1에 대한 지정된 위치로의 이동을 위해서는 MOVE 명령문을 등록합니다.
TaskStart 명령문은 멀티태스킹 실행을 위한 것으로 자세한 내용은 별도의 멀티태스킹 기능설명서를 참고하십시오. 단, 명령문 독립실행 자체가 서브태스크 1에서 실행되므로 TaskStart SUB=1은 사용할 수 없습니다.
[시스템/응용 파라미터/명령문 독립 실행] 화면에서 하기와 같이 설정합니다.
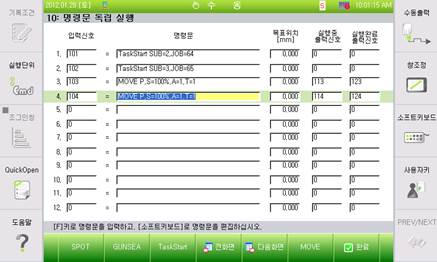
입력신호 | 해당 명령문을 실행할 입력신호 번호 |
명령문 | 독립실행할 명령문 |
목표위치 | 특정위치로 이동한 후, 수행되는 명령문인 경우 목표위치 |
실행중 출력신호 | 해당 명령문이 실행중일 때 출력 |
실행완료 출력신호 | 해당 명령문이 실행완료 되었을 때 출력 |
n TaskStart SUB=2,JOB=64
해당 입력신호(DI101)가 입력되면 0064.JOB(G1에 대한 팁드레싱 및 건서치 프로그램)이 로봇의 작업 프로그램과 독립적으로 실행됩니다.
n MOVE P,S=100%,A=1,T=1
해당 입력신호(DI103)가 입력되면 로봇의 작업 프로그램과 독립적으로 P1 이 MOVE 명령문에 기록된 위치와 조건으로 이동합니다. 단, 이동 조건으로 보간 종류는 P, Accuracy는 0으로 자동 조정됩니다.