3.7.4. Comm 탭
3.7.4. Comm 탭
현대 로봇 제어기와 통신할 방법을 설정합니다.
RS-232 시리얼 통신과 Ethernet 통신 중 하나만 선택이 가능합니다.
RS-232C Serial | Ethernet |
|
|
각 통신 방법은 버튼을 클릭하면 활성화 되고 다음과 같은 색으로 변합니다.
비활성일 경우는 버튼이 회색으로 변하고,내부 변수를 설정할 수 없습니다.
통신방법 | 활성 | 비활성 |
RS-232 |
|
|
Ethernet |
|
|




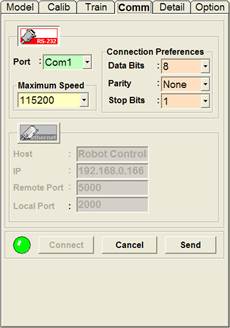
n RS-232
현대 로봇 제어기와 RS-232 시리얼 통신방법으로 통신합니다.
- Port : 통신할Com 포트를 선택합니다.
- Maximum Speed : 통신속도를 설정합니다.
- Data Bits : 데이터 비트를 설정합니다.
- Parity : 패러티 비트를 설정합니다.
- Stop Bits : 정지 비트를 설정합니다.
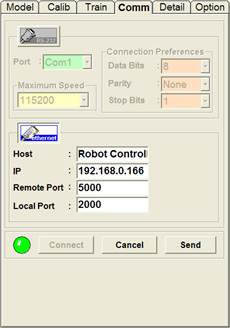
n Ethernet
HRVision 2D는 UDP/IP 프로토콜을 사용합니다. 본 기능은 Hi4a제어기에서는 사용할 수 없습니다.
- HOST : 접속할 호스트 명을 입력합니다.
- IP : 접속할 서버의 IP 주소를 설정합니다.
- Remote Port : 로봇 제어기의 포트를 설정합니다.
- Local Port : PC의 포트를 설정합니다.
n Connect
선택된 통신방법으로 현대 로봇 제어기와 통신 연결을 수행합니다.
n Cancel
연결된 통신을 해제합니다.
n Send
현대 로봇 제어기와의 연결 확인을 위하여 현대 로봇 제어기에 “Connected”라는 문자열을 송신합니다.