3.2. 용접건의 설치와 툴 프레임의 선정
3.2. 용접건의 설치와 툴 프레임의 선정
다시 라이브러리를 선택하고 적절한 용접건 컴포넌트를 불러옵니다. 그리고 건을 로봇에 마운트하십시오.
Hi5 제어기는 스텝 파라미터로서 0~15의 툴 번호를 지정할 수 있습니다. ROBCAD 시뮬레이션에서 각 스텝의 툴 번호 파라미터에 따라 그에 맞는 툴 정수가 적용되어야 하므로 어떤 디바이스가 어떤 툴 번호에 대응되는지 미리 지정되어 있어야 합니다.
따라서, 사용된 툴 번호의 디바이스의 툴 끝에는 정해진 형식에 맞는 이름의 프레임이attach되어 있어야 합니다. 그 형식은 [표 3-1]과 같습니다.
표 3‑1 툴 끝에 attach할 프레임의 형식
툴 번호 | 프레임 명 |
T0 | {robot 인스턴스명}_tcpf0 |
T1 | {robot 인스턴스명}_tcpf1 |
… | … |
T15 | {robot 인스턴스명}_tcpf15 |
예를 들어, robot 인스턴스명이 hs165_02이고 0번 툴 기준의 직교 조그를 하거나, 0번 툴을 사용한 작업프로그램을 시뮬레이션 하기 위해서는 해당하는 툴의 끝에 hs165_02_tcpf0이란 이름의 프레임이 attach되어 있어야 합니다.
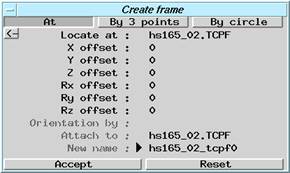
그림 3.3 Create frame 대화상자
Layout 메뉴에서 『Create frame』을 누르면 Create frame 대화상자가 나타납니다. [그림 3.3]과 같이 『Locate at, Attach to』 항목에 툴 끝 “entity”를 지정하고 “New name”에 정해진 형식의 이름을 지정한 후, [Accept]를 누르십시오. 생성된 frame의 방향이 틀린 경우에는 ROBCAD의 <Place Editor>로 방향을 고치면 됩니다.
모션대화상자에서 로케이션을 티칭할 때, 생성한 frame의 위치로 티칭하기 위해서는 [그림 3.4]와 같이 모션대화상자의 <Settings> 탭을 누르고 [Tcpf] 버튼을 누른 후, [그림 3.5]와 같이 나타나는 대화상자에 생성한 frame명을 입력하십시오.

그림 3.4 Settings 탭

그림 3.5 Tcpf 지정