2.10.3. 로봇 좌표계
2.10.3. 로봇 좌표계
수동모드의 모터 ON 상태에서 티치펜던트 후면의 [ENABLE] 스위치를 누릅니다.
티치펜던트의 좌표계 키를 눌러 상태표시줄의 좌표계가 직교를 표시 하도록 하고, 축 조작 키를 누르면 로봇이 다음의 그림과 같이 동작합니다.
하도록 하고, 축 조작 키를 누르면 로봇이 다음의 그림과 같이 동작합니다.
축 조작 키에 대한 로봇의 진행 방향은 2.10.1 JOG 조작 키를 참고하십시오.
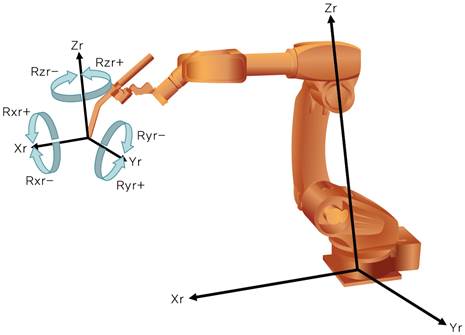
그림 2.50 로봇 좌표계

l 다음은 오른손 엄지, 검지, 중지 손가락을 직각으로 폈을 때, 로봇 좌표계를 편리하게 결정하기 위한 그림입니다. 로봇 후면에서 오른손 손가락의 진행방향을 로봇 좌표계의 X방향으로 두었을 때, 엄지 손가락의 진행방향이 Z방향, 중지 손가락의 진행방향이 Y방향이 됩니다. 이 원리를 이용하면 편리하게 로봇 좌표계에서 로봇의 동작을 이해할 수 있습니다.
l 회전방향은 오른손 엄지 손가락을 회전 중심축방향으로 두었을 때 나머지 손가락으로 말아쥐는 방향이 회전방향의 + 방향입니다.

그림 2.51 좌표계 방향 및 회전 방향