7.3.9. 유지전류 경감 설정
7.3.9. 유지전류 경감 설정
로봇 정지 자세에서 받는 모터가 받는 중력 부하를 경감시킬 수 있는 기능입니다.
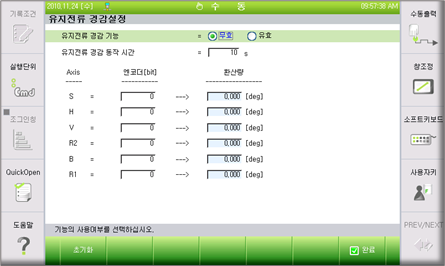
그림 7.41 유지전류 경감 설정 화면
n 유지전류 경감 기능
유효로 설정하면 기능이 동작합니다.
n 유지전류 경감 동작 시간
로봇 대기 후 유지전류 경감 기능 동작시간이 지나면 유지전류 경감 기능이 동작합니다. 이 시간을 너무 작게 하면 로봇 작업 중에도 빈번하게 동작하여 싸이클타임이 길어질 수 있습니다.
n 엔코더와 각도 환산량
유지전류 경감 기능이 동작할 때 각축 별 동작량입니다. 각도 환산량은 설정한 엔코더 값에 따라 자동으로 계산됩니다. 각도 환산량이 크면 툴 끝의 동작거리가 커지므로 적정한 엔코더량을 설정하십시오.

로봇 대기 중 유지전류 경감 기능이 동작하는 동안 스타트가 들어오면 유지전류 경감 기능이 완료된 후 로봇이 스타트합니다. 이 시간이 1~2초 정도 소요되는데, 외부 시스템과 동기를 맞춰 움직여야 할 때에 이 지연시간이 문제가 될 수 도 있습니다. 이러한 문제가 발생하는 경우에는 유지전류 경감 설정 기능을 무효로 변경해야 합니다.