2.4.2. 센서기반 부하추정
2.4.2. 센서기반 부하추정
센서기반 부하추정은 기존의 부하추정과 달리 힘센서를 이용하여 힘제어 툴의 중량과 중심을 추정하는 기능입니다. 힘제어 툴 데이터를 사용하지 않는 센서를 설정한 경우, 힘제어 툴 데이터 메뉴가 보이지 않으므로 센서기반 부하추정도 사용이 불가합니다. 센서기반 부하추정 실행은 다음의 순서로 진행합니다.
(힘제어 툴 데이터 화면 하단의 『[F1]: 센서기반 부하추정』으로 진입 )
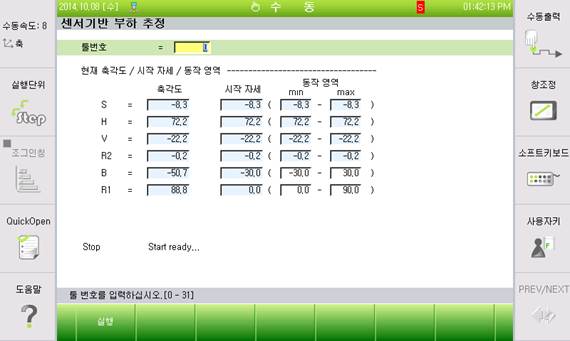
그림2.8 센서기반 부하 추정 설정 화면
① 부하추정 결과값을 반영할 툴번호를 입력합니다.
② B축과 R1축의 동작영역을 입력합니다. 부하추정 수행시 B축과 R1축만 동작하므로 다른 축의 동작영역은 입력하지 않습니다.
로봇이 동작 중 주변의 장치와 충돌하지 않도록 유의하여 설정합니다.
③ [ENABLE]스위치로 모터 ON 후 『[F1]: 실행』키를 눌러 부하추정을 수행합니다.
④ 부하추정이 끝나면 결과값이 출력됩니다.
⑤ 『[F7]: 종료』키를 눌러 반영여부를 설정합니다.
⑥ 설정한 힘제어 툴번호에 결과가 잘 반영되었는지 확인합니다.
참고: 로봇 파라미터의 툴 데이터와 부하추정은 로봇플랜지에 부착된 물체를 툴 데이터로서 취급합니다. 센서에 부착된 작업용 툴만을 다루는 힘제어 툴 데이터/센서기반 부하추정은 기존의 툴 데이터/부하추정과는 다름을 유의하십시오.