3.4.3. 하드웨어 기능
3.4.3. 하드웨어 기능
SafeSpace는 다음의 하드웨어 기능이 있어야 합니다.
SafeSpace의 안전 무결성은 PL=d (SIL 2), Cat. 3이며, 예외적으로 STO 기능은 PL=e (SIL 3), Cat. 3입니다.
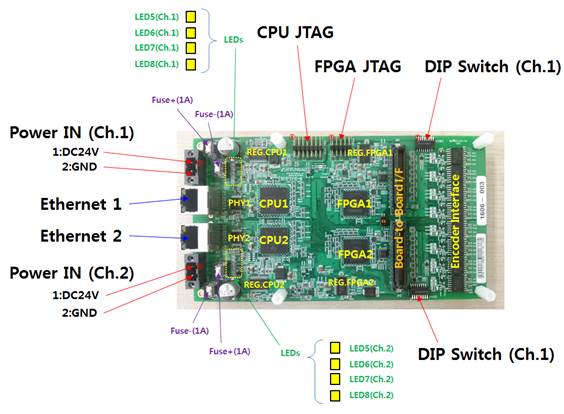
그림3.7SafeSpace의 내부 메인 보드
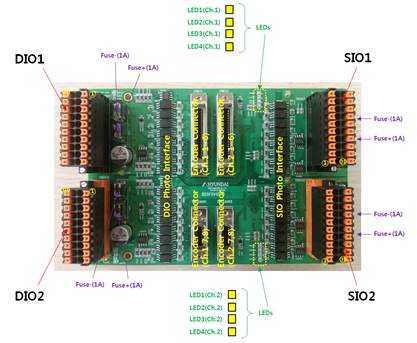
그림3.8SafeSpace의 내부 어퍼 보드
HF.1: 전원 공급 기능
이 기능은 SafeSpace 모듈에 제어 전원을 공급하는 것입니다.
DC24V입력이 슈퍼바이저를 갖춘 조절기에 의해 DC5V, DC3.3V, DC1.2V, DC2.5V로 분배됩니다.
HF.2: 워치도그 기능
이 기능은 CPU의 오작동을 감독하는 것입니다. 시간대 기반 워치도그 펄스를 사용합니다. 고장 나는 경우 CPU가 재설정되고 FPGA의 STO 출력 및 STO 버퍼가 정지됩니다.
HF.3: 시각 기능
시각은 CPU, FPGA, 이더넷 PHY의 작동에 사용됩니다. 시각 공급원은 하나의 크리스탈 발진기입니다. FPGA에서 PLL을 사용하면 이 시각 공급원이 각 구성요소에 대해 여러 시각으로 분리됩니다.
HF.4: CPU 기능
CPU는 안전 관련 기능을 수행하고 모듈을 작동시킵니다.
HF.5: FPGA 기능
FPGA는 채널 인터로크를 위한 듀얼 포트 RAM,로봇 위치 획득을 위한 직렬-병렬 데이터 변환부, 로봇 동작 정지 및 모터 전원 차단을 위한 STO 신호 출력, 외부 안전 PLC 접속을 위한 일반 디지털 입력/출력부로 구성됩니다.
HF.6: 엔코더 I/F 기능(RS485)
로봇 조작기의 위치가 각 축의 엔코더에 의해 시리얼 데이터로 전송됩니다. 이 시리얼 데이터는 RS-485 라인을 통해 로봇 제어기로 전송됩니다. 이 SafeSpace의 기능은 중간에서 이런 데이터를 획득하고 직렬-병렬 데이터 변환을 위해 FPGA로 입력합니다. RS-485 차분 신호를 언밸런스 TTL 로직 신호로 변경하는 것이 목적입니다.
HF.7: STO 기능 및 일반용 DIO
이 기능의 목적은 장애 발생 시 로봇의 동작을 정지하고 모터의 전원을 끄는 것입니다. 이 동작을 위해 CPU 또는 FPGA가 로봇 제어기로 디지털 신호를 출력합니다. 이 결과를 테스트 펄스 모니터링 신호로 모니터링합니다.
이 기능의 대상 안전 무결성은 PL=e (SIL 3), Cat. 3입니다.
또한 일반용 디지털 입력/출력이 있습니다. 이것들은 외부 안전 PLC와 IO데이터를 교환하는데 사용됩니다. 이것들의 대상 안전 무결성은 PL=d (SIL 2), Cat. 3입니다.
HF.8: 온도 센서 기능
모듈의 온도를 모니터링하기 위해 온도 센서가 사용됩니다. 과열되는 경우 모든 기능이 정지되고 CPU에 의해 STO 신호가 로봇 제어기로 출력됩니다.
HF.9: 이더넷 기능
이 기능은 안전 기능이 아니며 로봇 제어기와 SafeSpace 사이의 접속을 위한 것입니다. SafeSpace는 일반적으로 기능을 작동하기 위해 많은 설정값이 필요합니다.그래서 이 모듈은 로봇 제어기로부터 이런 값을 수신하고 이더넷 통신을 통해 정보를 전송합니다.
이 부분은 CPU의 EMAC 모듈, 이더넷 PHY, 이더넷 변환기 및 커넥터로 구성됩니다.
