4.3. 마스터링 테스트 기능
4.3. 마스터링 테스트 기능
신뢰할 수 있는 로봇 모니터링을 위해 로봇의 위치는 타당해야 합니다. 마스터링 테스트 기능은 로봇 및 외부 축의 상태를 평가하는 데 도움이 됩니다. 기준 위치와 현재 위치의 편차가 너무 크면 로봇 제어기가 오류를 발생시키고 로봇이 정지됩니다. 조작자는 로봇을 유지보수하고 캘리브레이션해야 합니다.
2가지 유형의 마스터링 테스트가 존재합니다.
표 4‑8 마스터링 테스트 유형
무센서 마스터링 테스트 | 센서 기반 마스터링 테스트 | |
기준 위치 | 날카로운 물체 또는 표시된 장비의 위치 | 전도성 센서의 위치 |
방법 | 조작자가 수동으로 수행함 | 프로그램이 자동으로 수행함 |
확인 | 안전 사용자 | 센서 신호 |
마스터링 테스트 메뉴에서 사용자는 테스트 유형, 시간 및 위치를 선택해야 합니다. SBMT 및 SLMT 구성 시의 공통 사항입니다.
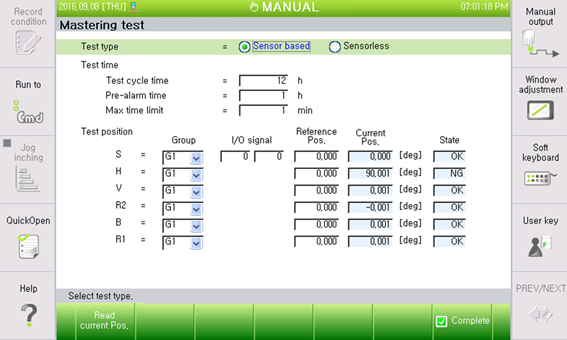
그림4.10 센서 기반 마스터링 테스트
표 4‑9 마스터링 테스트 파라미터
마스터링 테스트 | 마스터링 테스트 선택 | |
테스트 유형 | 테스트 유형 중 하나 선택 | |
테스트 시간 | 테스트 사이클 시간 [h] | 테스트 사이클 기간 (12h ~720h) 기본값: 12h |
사전 알람 시간 [h] | 테스트 시작 전 알림 시간 (1h~11h) 기본값: 1h | |
최대 시간 한계 [min] | 로봇이 시간 초과로 정지한 경우 모터가 켜진 후 로봇을 이동하는 최대 시간(1분~60분) 기본값: 1min | |
테스트 위치 | 그룹 | 마스터링 테스트 그룹 번호(1~3) |
I/O 신호 | - 입력/출력 신호 | |
기준 위치 [deg], [mm] | - 편차 확인 기준 위치 - 조깅하고 F1 키를 누르며 현재 기준 위치 판독 | |
현재 위치 [deg],[mm] | 현재 위치 또는 각 축 – 준비 상태만 해당 | |
상태 | 현재 위치와 기준 위치 사이의 편차 표현 -OK: 조인트의 위치가 범위 안에 있음 -NG: 조인트의 위치가 범위 밖에 있음 | |
구성된 파라미터를 저장하려면 SafeSpace 비밀번호가 필요합니다. 파라미터 설정 또는 변경 및 SLMT 수행은 비밀번호로 보호해야 합니다. 비밀번호는 HRSafeSpace로 설정됩니다.
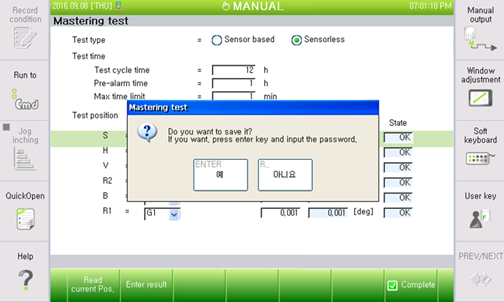
그림4.11 파라미터를 저장하려면 비밀번호를 입력하십시오.

그림4.12 비밀번호 입력용 소프트 키보드