10.5.6.4. LoadAIn (LCD핸들링 무주행 얼라인먼트 로봇에만 사용가능)
10.5.6.4. LoadAIn (LCD핸들링 무주행 얼라인먼트 로봇에만 사용가능)
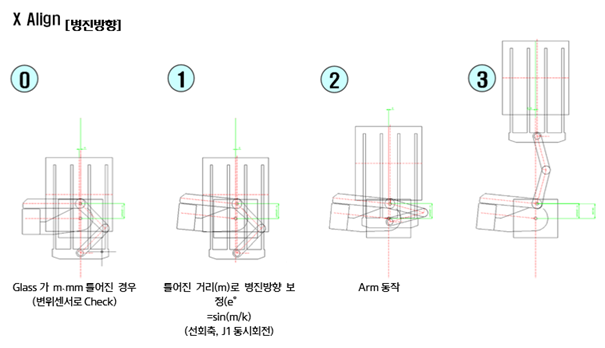
설명 | LCD핸들링 무주행 얼라인먼트 로봇에 한하여 Load With Alignment command 수행 입력받은 X얼라인먼트 량을 TH축, R(L)축, RA(LA)축의 보정량 계산시 사용할 수 있습니다. | ||
문법 | LoadAln <Delta_X, iRorL, Offset_Arm_TH, popValue, DeltaTheta_TH , DeltaTheta_RL, DeltaTheta_RALA > | ||
파라미터 | Delta_X | X 방향 글라스 변위량 | (mm) |
iRorL | 상하핸드 선택 | (mm) | |
Offset_Arm_TH | TH축에서Arm까지의거리 | (mm) | |
popValue | 출발할 스텝의 포즈(Load Wait) | Pose 변수 | |
DeltaTheta_TH | 얼라인먼트를 하기 위해 TH축에 반영할 보정량 | (deg) | |
DeltaTheta_RL | 얼라인먼트를 하기 위해 R(L)축에 반영할 보정량 | (deg) | |
DeltaTheta_RALA | 얼라인먼트를 하기 위해 RA(LA)축에 반영할 보정량 | (deg) | |
사용 예 | LoadAln V![327+V%[8],V%[8],V![323],P[2321],V![318],V![319],V![320] | ||