10.5.6.5. UnloadAIn (LCD핸들링 무주행 얼라인먼트 로봇에만 사용가능)
10.5.6.5. UnloadAIn (LCD핸들링 무주행 얼라인먼트 로봇에만 사용가능)
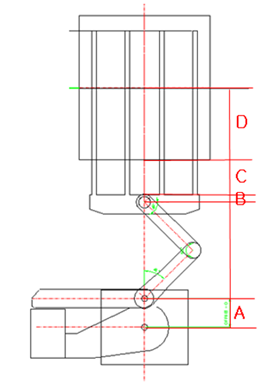
A: TH축에서Arm 중심까지의 거리
B: 핸드중심에서 포크 브라켓 끝단까지의 거리
C: 포크 브라켓 끝단에서 글라스끝단까지의 거리
D: 글라스의 1/2 사이즈
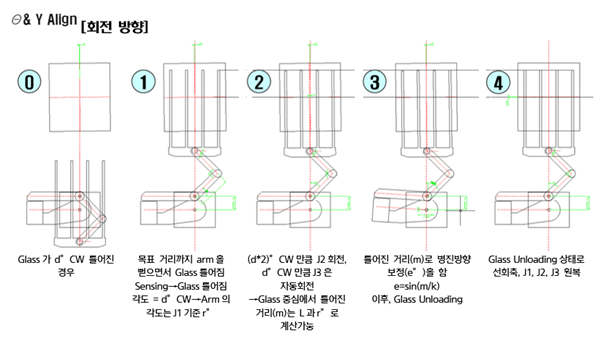
설명 | LCD핸들링 무주행 얼라인먼트 로봇에 한하여 Unload With Alignment command 수행시 TH축, R 또는 L축, RA축 또는 LA축의 보정량 계산시 사용할 수 있습니다. | ||
문법 | UnladAln <InTheta, InY, RorL, Offset_Arm_TH, Offset_ForkBracket, Offset_Hand , Offset_HalfGlass , Theta_TH , Theta_RL, Theta_RALA> | ||
파라미터 | InTheta | Theta로 돌아간 글라스 변위량 | 변위량 (rad) |
InY | y방향 글라스 변위량 | 변위량(mm) | |
RorL | 상하핸드 선택 | (0:R, 1: L) | |
Offset_Arm_TH | TH축에서Arm까지의거리 | (mm) | |
Offset_ForkBracket | 핸드중심에서 포크 브라켓 끝단까지의 거리 | (mm) | |
Offset_Hand | 포크 브라켓 끝단에서 글라스끝단까지의 거리 | (mm) | |
Offset_HalfGlass | 글라스의 사이즈 | (mm) | |
Theta_TH | 얼라인먼트를 하기 위해 TH축에 반영할 보정량 | (deg) | |
Theta_RL | 얼라인먼트를 하기 위해 R(L)축에 반영할 보정량 | (deg) | |
Theta_RALA | 얼라인먼트를 하기 위해 RA(LA)축에 반영할 보정량 | (deg) | |
사용 예 | UnloadAln LV2!,V![326],V%[8],V![323],V![340],V![343],V![344],V![318],V![319],V![320] | ||