7.3.8.1. 모델기반 충돌검지 설정
7.3.8.1. 모델기반 충돌검지 설정
모델기반 충돌검지 기능은 로봇이 동작 중에 정상적으로 발생해야 하는 토크와 실제 측정되는 토크의 차이를 로봇의 동역학 모델을 기반으로 계산하여 충돌을 검지합니다. 민감도를 설정하여 충돌에 대한 반응성을 조절할 수 있으며, 로봇이 저속으로 움직일 때에 발생하는 외부와의 접촉에 대해서도 검지할 수 있습니다. 또한 명령어를 통해 동작 구간별 충돌 검지 기능의 민감도를 조정 할 수 있습니다.
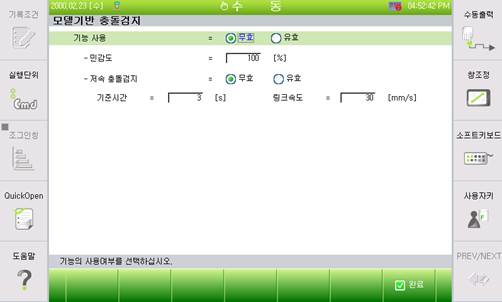
그림 7.70 충돌검지(축별) 설정 화면
n 기능 사용: 충돌검지 기능의 사용여부를 설정합니다.
n 민감도: 충돌검지의 민감도를 설정합니다. 값이 클수록 충격에 민감 합니다(0~200%).
JOB프로그램 상에서 명령어 ColDet Sensitivity 를 통해 구간 별 민감도를 조절할 수 있습니다. 단, 명령어를 통해 설정된 민감도는 메인 프로그램 END 또는 스텝 카운터 리셋 시 본 기능의 매뉴에서 설정한 민감도로 초기화 됩니다.
명령어 사용 예>
명령어 입력 : 『[F6]: 명령입력』→『[F1]: 모션, I/O』→『ColSense』

충돌검지 메뉴에서 민감도를 100%로 설정한 경우
- S1~S4: 민감도100%로 검지
- CALL 10~ S7: 민감도 50%로 검지
n 저속 충돌검지
① 기능 사용: 충격량이 적은 저속 충돌검지 기능의 사용여부를 설정합니다.
② 기준 시간: 충돌로 판단하기 위한 기준 시간.
기준 시간이상 충격력이 발생하면 충돌로 판단합니다.
③ 링크 속도: 저속으로 판단하기 위한 기준 속도.
기준 링크 속도 이하에서만 저속 충돌을 검사합니다.
다음의 메뉴들은 엔지니어 모드 이상에서만 화면에 표시되며 편집할 수 있습니다.
n 축별 검지 기준: 저속 충돌 토크 오차의 허용 비율을 의미하며 낮을수록 저속 충돌에
민감 하게 반응 합니다.
n To: 충돌로 인한 급격한 토크변화 검출을 위한 시정수로 낮은 값일수록 충돌에 민감하게 반응 합니다.

l 본 기능은 로봇 축에서 충돌을 검지하기 때문에 로봇에 충격 전달이 불가한 경우에는 충돌이 검지되지 않습니다.
l 기능은 모터 ON 상태에서 로봇에 대한 충돌만을 검지 합니다.
l 일부 특주형 로봇의 경우 본 기능을 지원하지 않습니다.
l 부하추정 및 센서기반/센서리스 힘제어 기능 수행 시 충돌을 검지하지 않습니다.
l 툴중량 및 축별 부가중량이 실제와 다를 경우, 오검지가 발생할 수 있습니다.
l 본 기능은 Hi5a 제어기 버전 V40.17-00부터 지원 합니다.