13.2. MOVE - 스텝 위치
13.2. MOVE - 스텝 위치
(1) 이동명령에서 [Quick Open] key를 누릅니다.
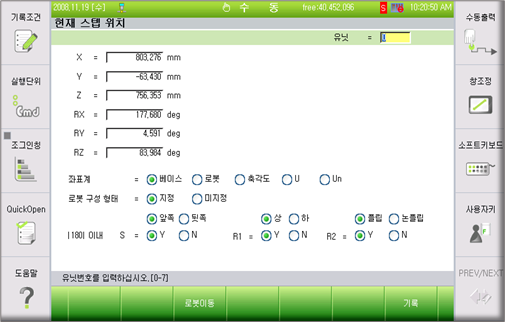
그림 13.2 MOVE문 Quick Open
(2) 해당 스텝 위치(pose)를 표시합니다.
- Pose를 변경할 때는 커서키를 이용해 이동한 후 수정 후 [ENTER]키를 누릅니다. 숫자 입력 후에 [ENTER]키를 누르면 입력한 내용이 기록됩니다.
- 로봇형태는 로봇위치를 기술할 때 그 기구특성상 복수(複數)의 해(解)가 존재합니다. 따라서, 그 형태를 유일하게 기술하려면 로봇형태의 지정이 필요합니다. < > 항목 중 하나를 선택하여 지정하는 경우 [SHIFT] + [←] [→]를 이용합니다.
- 프로그램에 반영하려면 『[F7]: 기록』키를 눌러 종료해야 합니다. 취소를 눌러 종료하면 화면에 표시된 내용이 반영되지 않습니다.