7.2. 참조점기록
7.2. 참조점기록
참조점을 기록하는 순서는 아래와 같습니다.
- Jog키로 참조점을 기록할 위치로 이동
- 커서를 참조점이 기록될 위치(통상 WEAVON 명령 바로 위쪽 스텝)로 이동
- [사용자키] → [REFP]키를 누르거나(숨은 포즈사용), [명령입력] → [Arc] → [REFP]를 눌러 참조점을 기록(포즈변수 입력)
(1) REFP 1: 벽방향이 로봇좌표계의 Z축과 다른 경우에 설정
참조점 1은 벽방향을 결정하는 평면 위의 한 점으로 설정합니다. 그 한 점이 벽방향을 결정하는 평면 위에 있으면 위치는 상관없습니다. 그러나 참조점 1과 용접선의 거리가 너무 가까우면 벽방향 계산 시 발생하는 오차가 커질 수 있으므로 참조점 1과 용접선 사이의 거리가 너무 가깝지 않게 설정하는 것을 권장합니다.
(2) REFP 2: 접근점이 위빙의 반대 방향에 있을 경우에 설정
벽방향을 결정하는 평면(벽방향을 포함하는 평면)을 기준으로 하여 해당 평면의 왼쪽에 위빙 궤적을 생성할 것인지 오른쪽에 생성할 것인지를 설정하는 용도로 사용됩니다. 참조점2의 위치는 벽방향을 결정하는 평면을 중심으로 좌, 우를 구별할 수 있으면 어느 곳이든지 상관없습니다. 그러나 벽방향 평면과의 거리가 너무 가까우면 계산된 수평방향의 오차가 커질 수 있으므로 적당한 거리를 두고 참조점 2를 설정하는 것을 권장합니다.
(3) REFP 3: 정지 위빙처럼 진행방향을 결정할 수 없는 경우에 설정
참조점3은 진행방향을 나타내는 직선 상에 있으면 어느 위치이든지 상관 없습니다. 그러나 시작점(종료점)과의 거리가 너무 가까우면 계산된 결과의 오차가 커질 수 있어 적당한 거리를 두고 설정하는 것을 권장합니다.
(4) REFP 4: 위빙 패턴의 각도를 측정하기 어려운 경우에 설정
REFP 4를 이용하여 위빙 패턴의 각도를 직접 지정합니다.
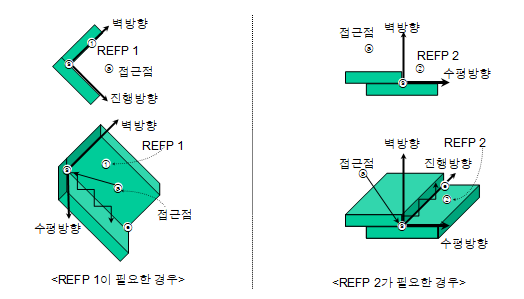
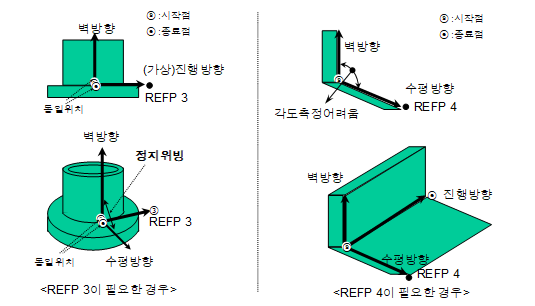
그림 7.3 참조점 종류별 활용

l REFP 1: 용접선과의 거리는 최소 5mm 이상으로 설정하십시오.
l REFP 2: 벽 방향 평면과의 거리는 최소 5mm 이상으로 설정하십시오.
l REFP 3: 시작점과의 거리가 최소 5mm 이상이 되도록 설정하십시오.
l REFP 4: 위빙 패턴의 각도를 측정하기 어려운 경우 각도를 지정합니다.