2.5.3.1. 축 각도 기록좌표
2.5.3.1. 축 각도 기록좌표
수동모드에서 『[F2]: 시스템』 → 『1: 사용자 환경』 → 『1: POSE 기록형태=<축 각도>』로 선택되어 기록된 MOVE 명령문에서 [Quick Open]키를 누르면 다음의 화면이 표시됩니다.
엔코더로 기록되어있는 로봇의 자세는 위치확인만 가능하며 위치데이터를 수정할 수 없습니다.
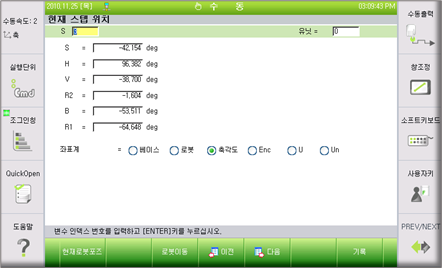
그림 2.39 MOVE명령문에서의 Quick Open
수동모드에서 『[F2]: 시스템』 → 『1: 사용자 환경』 → 『1: POSE 기록형태=<축 각도>』로 선택되어 기록된 MOVE 명령문에서 [Quick Open]키를 누르면 다음의 화면이 표시됩니다.
엔코더로 기록되어있는 로봇의 자세는 위치확인만 가능하며 위치데이터를 수정할 수 없습니다.
그림 2.39 MOVE명령문에서의 Quick Open