4.7.6. 미러 이미지
4.7.6. 미러 이미지
로봇의 S축 0°위치에서 Y-Z평면을 기준으로 하여 S축 위치와 손목축의 자세가 대칭인 프로그램을 작성할 수 있습니다.
이 기능은 자동차의 Body 용접 등, 좌우에 있는 2대의 로봇에 대해 동일한 동작이 요구될 때 유용합니다. 1대의 로봇에 대해 작업을 티칭을 한 후, 반대편 로봇은 이 프로그램을 읽어 들여 미러 이미지로 프로그램을 변환하면 S축에 대칭인 작업 프로그램이 만들어집니다.

그림 4.12 원래 프로그램 → 미러 이미지 변환된 프로그램
(1) 『[F1]: 서비스』 → 『6: 프로그램 변환』 → 『6: 미러 이미지』를 선택합니다.
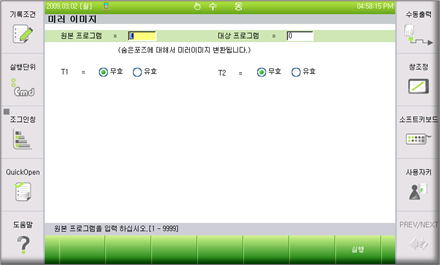
(2) 데이터를 입력한 후, 『[F7]: 실행』키를 누릅니다.
n 원본 프로그램: 기존에 있는 프로그램 번호
n 대상 프로그램: 미러 이미지를 적용하여 생성될 프로그램 번호
n T1: 주행축의 미러 이미지 변환을 원하는 경우 <유효>로 설정합니다.

l 미러 이미지로 변환 중 각축 별로 소프트리미트 범위를 벗어나면 ‘범위초과스텝’에 표시됩니다.
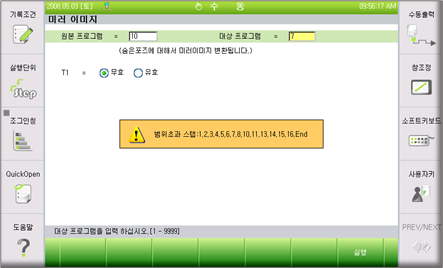
이때, ‘범위초과스텝’란에 『End』는 검사가 종료된 상태이고, ‘=>’은 범위를 벗어나는 스텝이 더 있다는 의미입니다.
l 범위초과 스텝이 존재하면 어떤 축이 소프트리미트 범위를 벗어나는지 직접 확인하여 조정해야 합니다.
l 로봇타입마다 소프트리미트가 각각 다르기 때문에 미러 이미지 기능은 동일 타입의 로봇에 대해 사용하십시오.
l 엔코더의 기준위치와 각 축 0°위치를 좌우의 로봇에 대해 동일하게 설정하여 주십시오.
l 좌우 대칭인 Gun과 툴을 사용하거나 또는 동일한 Gun과 툴을 좌우대칭이 되도록 취부하십시오.