7.6.4. 부하추정 기능
7.6.4. 부하추정 기능
부하추정 기능이란 로봇의 선단에 부착된 부의의 질량과 그 중심위치를 구하는 기능입니다. Hi5 제어기는 동역학 기반 제어기 입니다. 따라서 동작 계획시에 각 축에 발생하는 토크 계산하고 이를 기반으로 가감속도 계획을 합니다.
제어기 내부에 로봇의 본체에 대해서는 각 링크의 질량, 질량 중심, 이너셔(inertia)가 등록되어 있습니다. 그러나 툴은 사용자의 목적에 따라서 부착하는 것이므로 사용자가 입력하여야 합니다. 만일 CAD데이터로 툴의 질량과 무게 중심의 위치가 알려져 있다면 이 값을 사용자가 직접 입력하는 것이 가능합니다. ‘『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『1: 툴데이터』’에서 툴 질량(kg),중심, 이너셔(inertia) 입력이 가능합니다.
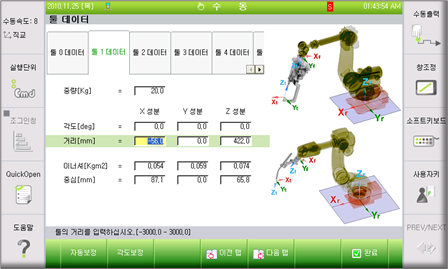
그림 7.62 툴 데이터 설정화면
그러나 대개 툴의 질량과 무게 중심을 CAD데이터로부터 얻기가 쉽지 않습니다. 따라서 로봇제어기에서 자동으로 툴의 동역학데이터를 산출하는 기능이 바로 부하추정 기능입니다.
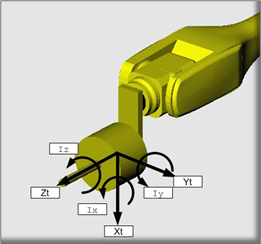
그림 7.63 툴 데이터