7.6.4.4. 부하추정 기능 실행 방법
7.6.4.4. 부하추정 기능 실행 방법
부하추정 기능은 부하추정1과 부하추정2의2가지 방법이 준비되어 있습니다.
부하추정 1 방식은, 무부하 상태에서 부하추정을 실행하여 무부하데이터 파일을 만든 뒤 부하를 장착하고 다시 부하추정을 실행하는 방식입니다. 부하추정 1 방식은 부하추정 2방식에 비해 부하값을 정확히 얻어낼 수 있는 장점이 있지만, 무부하 상태에서 먼저 측정해야 하기 때문에 현장에서는 사용하기 어려운 문제가 있습니다.
부하추정2는 부하추정1에 비해 추정한 데이터의 정확도는 낮지만 무부하 데이터를 필요로 하지 않기 때문에 부하 장착 이전에 무부하 파일을 작성하지 않은 경우에 사용할 수 있습니다. 부하추정1과 부하추정2는 각각 다음의 순서로 실행합니다.
(1) 부하추정1
부하추정 1은 2가지 단계로 나누어집니다.
1단계는 부하를 달지 않은 상태에서 무부하 데이터를 작성하는 단계입니다. 무부하 데이터를 작성한 결과는 ‘로봇명.NLD’ 파일로 작성됩니다. 따라서 현장에서 무부하 데이터를 작성할 수 없는 경우에는 미리 작성된 ‘로봇명.NLD’ 파일을 제어기로 복사하여 사용할 수도 있습니다.
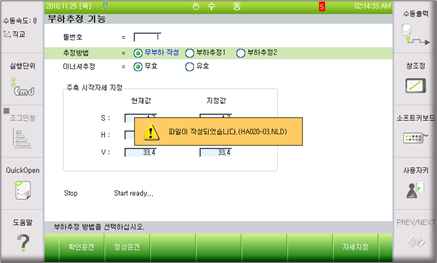
그림 7.66 무부하 데이터 작성이 정상적으로 종료된 경우
2 단계는 로봇에 부하를 취부한 상태에서 부하추정1을 실행하여 중량과 무게중심 거리를 추정하는 단계입니다. 이 때 주의할 점은 무부하 데이터를 작성할 때와 동일한 초기자세로 부하추정 1을 실행하는 것입니다. 이 초기자세는 무부하 데이터에 같이 기록되어 있습니다. 따라서 자동으로 주축 시작자세가 지정되며 이 상태에서 부하추정을 수행하면 됩니다. 시작자세를 임의로 변경하고 실행하면 다음과 같은 메시지가 출력되고 실행되지 않습니다.
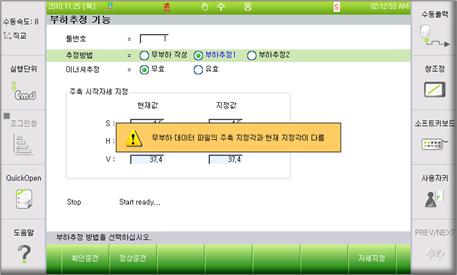
그림 7.67 지정각도가 다른경우 처리
(2) 부하추정2
부하추정 2는 부하추정1에 비해서 추정결과의 정확도가 낮지만, 무부하 데이터를 작성하기 어려운 경우에 사용하는 기능입니다. 부하추정 2에서는 무부하 데이터를 사용하지 않으므로‘로봇명.NLD’ 파일과는 무관하게 추정 기능을 수행합니다. 부하추정을 실행하기 위한 로봇의 동작은 부하추정 1과 동일합니다.