7.6.4.5. 메뉴구성
7.6.4.5. 메뉴구성
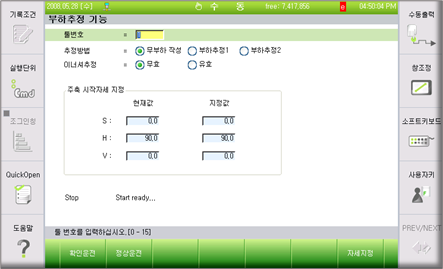
그림 7.68 부하추정 설정
(1) [SHIFT]+[<-][->]키를 사용하여 현재 로봇의 선단에 달려있는 툴의 번호와 부하추정 기능을 사용할 추정방법을 결정합니다.
(2) 부하추정 프로그램이 주변 JIG와 충돌하지 않을 정도로 로봇 본체의 위치를 이동하고, 『[F7]: 자세지정』키를 눌러 부하추정 프로그램을 실행할 로봇의 시작자세를 지정합니다.
(3) 『[F1]: 확인운전』키를 눌러 부하추정시 로봇 주위 물체들과 충돌여부를 확인합니다. 충돌위험시 『비상정지』키를 눌러 로봇을 정지시킵니다.
(4) 확인운전 후 『[F2]: 정상운전』키를 눌러 부하추정을 시작합니다.
(5) 추정방법이 <부하추정 1> 또는<부하추정 2>로 선택되었을 때, 『[F2]: 정상운전』키를 눌러 로봇이 부하정보를 얻기 위한 일정한 패턴을 동작합니다. 자동으로 로봇제어기가 부하데이터를 계산하며 그 결과를 다음의 화면과 같이 표시합니다.
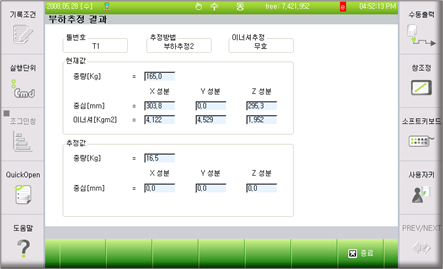
그림 7.69 부하추정 결과
(6) 부하추정 프로그램 종료 후에 위와 같은 부하 추정 결과가 표시된 후 『[F7]: 종료』키를 누르면 추정결과를 툴 데이터로 반영할까요?』의 물음에 대해 [YES]키를 눌렀을 경우는 추정된 결과가 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『1: 툴 데이터』에 반영되고, [NO]키를 눌렀을 경우는 반영되지 않습니다.
n 툴 번호
로봇 선단에 취부되어 있는 부하를 몇 번째 툴로 사용할 것인지 선택합니다. Hi5 제어기에서는 0 ~ 15까지 15개의 툴을 사용할 수 있습니다.
n 추정방법
① 무부하작성
로봇에 부하를 취부하지 않고 무부하 데이터 파일(로봇명.NLD)을 작성하기 위해 선택합니다. 무부하 데이터 파일을 작성하는 방법은 로봇을 동작하기에 간섭이 없는 적당한 위치로 이동하고 『[F7]: 자세지정』키를 누른 후, 『[F2]: 정상운전』키를 누릅니다. 부하추정 1을 사용하여 부하에 대한 데이터를 얻기 위해서는 무부하 데이터 파일(로봇명.NLD)이 반드시 필요합니다
② 부하추정 1
내부 메모리에 무부하 데이터 파일(로봇명.NLD)이 존재할 때, 부하추정 1을 선택하고 『[F2]: 정상운전』키를 누름으로서 부하에 대한 질량과 중심을 측정할 수 있습니다. 만약 무부하 데이터 파일(로봇명.NLD)이 존재하지 않을 때, 『[F2]: 정상운전』키를 눌렀을 경우는 안내프레임에 “무부하 데이터 파일이 존재하지 않습니다.”라는 메시지가 표시됩니다.
③ 부하추정 2
내부 메모리에 무부하 데이터 파일(로봇명.NLD)이 존재하지 않는 경우, 부하추정 2를 선택하고 『[F2]: 정상운전』키를 눌러 부하에 대한 질량과 중심을 계산합니다.
n 이너셔 추정
툴부하 중량과 중심위치뿐만 아니라 툴의 이너셔도 함께 추정합니다. 툴의 이너셔를 추정할 때는 로봇이 고속으로 동작하므로 반드시 확인운전을 실행하여 주위 간섭 없이 안전하게 동작하는지 확인해야 합니다.
n 주축 시작자세 지정
각각의 추정 방법에서 사용할 로봇 동작의 시작자세를 지정합니다. 사용자는 로봇의 기본축을 이동시켜 로봇이나 툴에 간섭이 발생하지 않도록 위치를 결정한 후 『F7: 자세지정』키를 눌러서 시작자세를 지정합니다. 부하추정1 기능을 사용하기 위해서는 무부하작성시의 시작자세와 동일한 시작자세를 사용해야 합니다.
S축과 H축은 자세 지정에 제한이 없지만 V축은 지면에 대해서 -60deg 이상 및 +60deg이하로 설정해야 하며 가능한 V축 링크가 지면과 평행하게 설정하는 것이 추정결과를 좋게 합니다.
Hi5제어기의 티칭 펜던트에 표시되는 V축의 각도는 아래의 두번째 그림과 같이 지면에 대한 각도가 아니라 이전 축에 대한 각도로 표시되고 있습니다. 참고로 아래의 첫번째 그림과 같이 기존의 Hi4제어기에서 V축은 지면에 대한 각도로 환산되어 표시되었습니다.

그림 7.70 [HX165-Hi4 H=40deg, V=0deg, V축 지면기준 각도 0deg]

그림 7.71 [HS165-Hi5 H=40deg, V=0deg, V축 지면기준 각도 -50deg]
Hi5 제어기에서 V축의 지면에 대한 각도 환산식은 다음과 같습니다.
V축의 지면에 대한 각도 = H축 각도 + V축 각도 -90 deg
V축 링크와 지면의 각도를-60deg~60deg 이외의 자세에서 『[F7]: 자세지정』키를 누르면 『V축의 각도는 지면에 대해서 60도 이내이어야 합니다.』 메시지가 표시됩니다.
손목축의 시작자세는 자동적으로 R2=0.0deg, B=-Vdeg, R1=0.0deg로 정의 됩니다. 즉, R2축, R1축은 0도로 지정되고, B축은 V축과 반대의 값을 갖게 되어 손목 축이 수평자세를 유지하도록 합니다.
① 현재 값
현재 로봇이 취하고 있는 주(S, H, V)축의 자세를 각도로 표시합니다.
② 지정 값
무부하 데이터 파일(로봇명.NL0)이 존재하는 경우는 그 파일을 만들 때의 로봇 주(S, H, V)축의 자세가 각도로 표시됩니다.