2.6.1. 부품 조립 예제
2.6.1. 부품 조립 예제
힘제어 기능을 이용하여 부품을 조립할 때에 참고할 수 있는 예제입니다. 상황에 맞게 각 파라미터 및 조건문을 수정하여 사용하십시오.
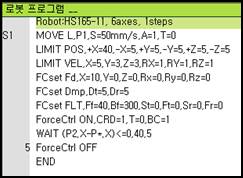
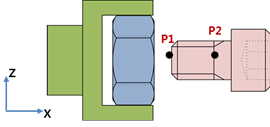
그림2.9 부품 조립 예제 프로그램
표 2‑1 부품 조립 예제 프로그램
로봇의 움직임 | § S1에 저장된 P1의 위치로 이동한 후, 힘제어를 시작함. § 힘제어가 시작되면 로봇좌표계의 X방향으로 설정한 힘에 § 로봇이 P2의 위치에 도달했을 때 조립이 완료된 것으로 |
최대 동작 영역 (LIMIT POS) | § 로봇좌표계를 기준으로 힘제어 동작범위 설정함. § X= -5 ~ 40[mm], Y= -5 ~ 5[mm], Z= -5 ~ 5[mm] |
최대 동작 속도 (LIMIT VEL) | § 로봇좌표계 기준(ForceCtrl ON, CRD=1 이므로) § X = 5[mm/s] § Y,Z = 3[mm/s] § RX,RY,RZ = 1[deg/s] |
제어하려는 힘의 크기 (FCset Fd) | § Y,Z,Rx,Ry,Rz=0 : 0N의 힘을 유지하도록 제어함. § X=10[N] : 로봇좌표계기준 X방향으로 10N의 접촉힘이 되도록 제어함. 힘의 크기는 조립품간의 마찰을 고려하여 설정해야 함. |
힘제어시 로봇의 조건 (FCset Dmp, FLT) | § Dt=5, Dr=5 : 모든 방향을 5단계의 유연함으로 제어함. § FLT : Ff와 Bf값으로 유연함을 조절함. 값이 작을수록 부드럽게 동작하지만 동작에 지연이 생길 수 있음. |
ForceCtrl ON, CRD=1, T=0, BC=1 | 힘제어 실행 § CRD=1 : 로봇좌표계(1) 기준으로 힘제어 동작 § T=0 : 0번 힘제어 툴 데이터를 사용 § BC=1 : 힘제어를 시작할 때 힘센서 데이터를 초기화 |
WAIT (P2.X-P*.X)<=0,40,5 | § P*.X(로봇의 X방향의 현위치)와 P2.X(조립이 완료된 상태에서 로봇의 X방향 위치)의 차이가 0보다 작거나 같을 때까지 힘제어를 수행함. § 40,5 : 40초동안 조건을 만족시키지 못할시 5번 행(ForceCtrl OFF)으로 분기되어 힘제어가 종료됨. |
ForceCtrl OFF | 힘제어 종료 |