5.3.3. 용접시퀀스
5.3.3. 용접시퀀스
스폿용접과 관련된 시퀀스를 설정하여 작업환경에 따라 로봇의 동작을 결정합니다.
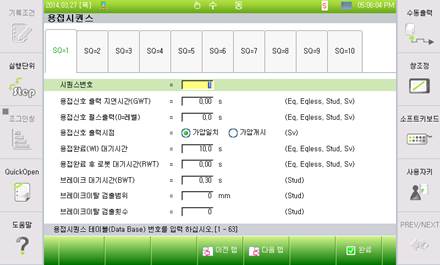
(1) 시퀀스번호
용접시퀀스중 원하는 용접시퀀스를 빠르게 선택합니다.
(2) 용접신호 출력 지연시간(GWT)
서보건의 경우는 가압일치 후에 용접 신호를 출력할 때까지의 대기시간입니다.
공압건의 경우는 SPOT 명령문 실행 후 용접 신호를 출력할 때까지의 대기시간입니다.
(3) 용접신호 펄스출력(0=레벨)
용접 신호를 일정시간 동안만 출력하기 위한 항목입니다. “0”으로 설정하면 용접완료(WI) 신호가 입력될 때까지 계속 출력합니다.
(4) 용접완료(WI) 대기시간
용접완료(WI) 신호가 입력되기까지 대기하는 시간입니다. 이 값을 “0”으로 설정하면 입력될 때까지 계속 대기합니다.
(5) 용접완료 후 로봇 대기시간 (RWT)
통상 용접완료(WI) 신호가 입력 후 용착 검출을 대기하는 시간입니다. “0.0”으로 설정될 경우 용착 검출을 하지 않습니다. 용착 검출 신호를 사용할 때에는 “0.3초(300msec)” 이상의 값을 입력하기를 권장합니다. 그러나 이 값이 크면 용접시간이 길어지고 사이클타임이 증가하게 됩니다.
(6) 브레이크 대기시간 (BWT)
로봇건으로 Stud건을 사용하여 스폿용접 수행 시 브레이크를 동작할 때까지 대기시간을 입력합니다.
(7) 브레이크이탈 검출 범위
로봇건으로 Stud건을 사용하여 스폿용접 수행 시 로봇 각축이 이탈된 거리를 검출할 범위를 설정합니다.
(8) 브레이크이탈 검출 횟수
로봇건으로 Stud건을 사용하여 스폿용접 수행 시 이탈 범위를 초과한 횟수가 설정된 값보다 많을 경우 경고를 표시합니다.