7.3.9. 충돌검지(TCP) 설정
7.3.9. 충돌검지(TCP) 설정
TCP기반 충돌검지 기능이 유효로 설정되어 있는 상태에서 로봇의 충돌검지 레벨을 설정합니다.
충돌검지 기능의 유/무효 설정과 민감도에 따른 충돌검지 값은 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『8: 충돌검지(TCP) 설정』 메뉴에서 설정합니다. (이 메뉴는 충돌검지 기능을 사용할 수 있는 로봇이 선택된 경우에만 나타납니다.)
충돌검지 기능이 유효로 설정되면, Collision 명령이 없으면 메뉴창에 설정된 디폴트 민감도로 검지합니다. 자동모드에서는 민감도(자동모드)의 민감도로 검지하고 조그모드에서는 민감도(Jog모드)의 민감도로 검지합니다. Collision 명령이 있으면 다음 Collision 명령을 만날 때까지 해당 민감도로 충돌검지를 실행합니다. 민감도가 0에 가까울수록 민감하게 충돌을 검지합니다.
l 충격량이 민감도 설정치를 초과하면 모터가Off되면서 『E0254 충돌 검지 (해당 민감도 ○)』라는 메시지가 표시됩니다.
l 모터가 Off되고 수초 후 다시 모터가 On이 되면서 로봇이 충돌전의 위치로 자동으로 퇴피합니다. 이때 자동 퇴피 거리는 충돌검지(TCP) 설정 메뉴에서 설정할 수 있습니다.
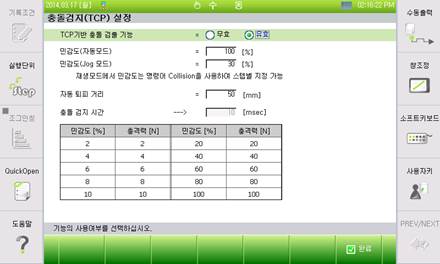
그림 7.69 충돌검지(TCP)설정 화면
위 그림과 같이 충돌검지(TCP) 설정 메뉴에서……
l TCP기반 충돌 검출 기능 유효/무효 설정 텝을 통해 TCP기반 충돌검지 기능을 활성화 시킬 수 있습니다.
l 메뉴에 설정된 민감도는 JOB 프로그램의 스텝에 별도의 『Collison』 명령을 사용하지 않은 경우 적용되는Default 민감도 입니다. 사용자가 임의로 변경할 수 있습니다.
l 자동 퇴피 거리에서는 충돌 후 로봇이 자동으로 퇴피하는 거리를 설정할 수 있습니다.
l 충돌 검지 시간은 충돌 후 로봇이 정지할 때까지의 시간을 보여줍니다.
l 스텝별로 보다 민감하게 충돌을 검출하고 싶을경우, 아래 그림과 같이 스텝사이에 Collision 명령을 이용하여 원하는 민감도를 적용할 수 있습니다.
l 예를들어 아래 JOB 프로그램에서는 스텝1부터 스텝2는 민감도0으로 충돌검지를 하지 않고, 스텝3부터 스텝4는 민감도 100으로, 스텝5부터 스텝6은 민감도 2로, 스텝 7부터 스텝9까지는 민감도 30으로 충돌을 검지하게 됩니다.
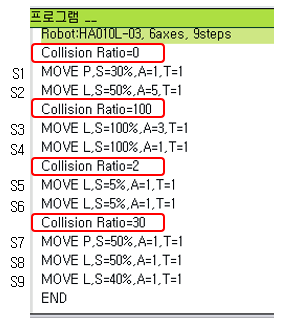
그림 7.70 스텝별 민감도 설정을 위한 Collision명령 이용