3.1.5. 스텝옵션 PK(픽킹), PS(팔레타이즈 쉬프트), PU(픽컹업) 기능
3.1.5. 스텝옵션: PK(픽킹), PS(팔레타이즈 쉬프트), PU(픽컹업) 기능

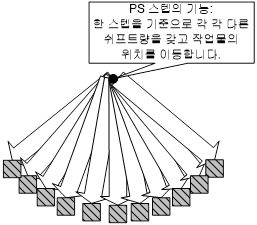
(a) 픽킹(PK) 스텝의 기능 (b) 팔레타이즈 쉬프트(PS) 스탭의 기능
그림 3.4 픽킹(PK) 스텝 및 팔레타이즈 쉬프트(PS) 스텝의 기능

그림 3.5 픽킹업(PU) 스텝의 기능
※ 참고사항
l PK, PU, PS는 팔레타이즈 기능을 수행하기 위한 스텝에 기능을 부여하는 것이며, 사용자의 판단에 의해 적절한 스텝 조건을 사용해야만 합니다. PK, PU, PS를 설정하는 방법은 두 가지가 있습니다.
① 사용자 키(f1, f2, f3, f4)를 이용한 설정 방법 (『Hi5 제어기 조작설명서』 참조)
② 스텝 티칭 후, 명령수정으로 설정할 수 있습니다.
※ 주의사항
l 로봇 티칭시에 스텝은 최초 티칭된 스텝뿐만 아니라, 쉬프트 될 스텝위치 또한 로봇의 동작영역 내에 존재할 수 있도록 충분히 고려하여 티칭하여야 합니다. 그렇지 않을 경우, 『Arm이 이루는 각도가 너무 작음(큼.)』, 『쉬프트 리미트를 초과하였음.』 라는 에러 메시지가 발생할 수 있습니다. 이런 경우 티칭된 스텝을 조정함으로써 해결 할 수 있습니다.