3.4.4. 조작방법
3.4.4. 조작방법
(1) 수동모드를 선택합니다.
(2) 개방시작 위치까지 로봇/서보핸드축을 이동하여 [기록]키를 누르면 스텝이 기록됩니다.
(3) HANDOPEN명령어 입력 후 『개방옵셋거리』를 입력합니다.
(4) 입력방법은 티칭할 프로그램을 선택 후 『[F6]: 명령입력』 → 『[F6]: 핸들링』 → 『[F7]: HANDOPEN』를 선택합니다.
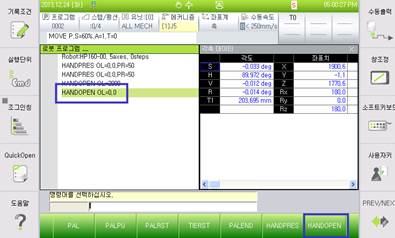
그림 3.7 HANDOPEN 명령 입력
(1) 수동모드를 선택합니다.
(2) 개방시작 위치까지 로봇/서보핸드축을 이동하여 [기록]키를 누르면 스텝이 기록됩니다.
(3) HANDOPEN명령어 입력 후 『개방옵셋거리』를 입력합니다.
(4) 입력방법은 티칭할 프로그램을 선택 후 『[F6]: 명령입력』 → 『[F6]: 핸들링』 → 『[F7]: HANDOPEN』를 선택합니다.
그림 3.7 HANDOPEN 명령 입력