3.6.2. Calib 탭
3.6.2. Calib 탭
영상좌표계와 카메라 좌표계를 일치시키는 카메라 캘리브레이션을 수행하는 모드입니다. HRVision Press는 다음과 같은 보정판을 이용하여 캘리브레이션을 수행합니다.
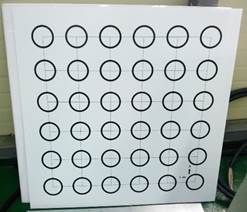
크기가1000mmx 1000mm인 보정판은 직경이 100mm 인 원을 170mm 간격으로 배치한 형태로, 각 원의 중점은 가는 실선으로 교차되어 표시되어 있습니다. 보정작업시 사용되는 보정점은 표1을 참조하여 비전 작업 환경 및 좌표계 방향에 따라 보정판 원중 임의의 세점을 선택하여 P1, P2, P3 위치를 지정하며, P1, P2, P3 지점에 대한 영상좌표계와 로봇 좌표계 위치를 측정하여 입력합니다.
“Calib”탭의 상세한 설명은 다음과 같습니다.
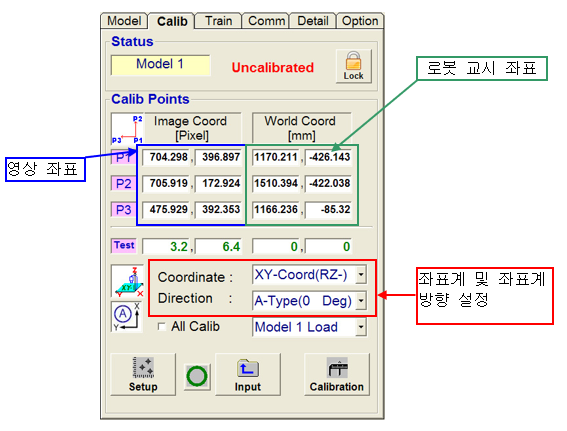
n Status : 모델명, 캘리브레이션 유무 등을 표시합니다.
- Model : 캘리브레이션이 수행되는 모델을 나타냅니다.
- 캘리브레이션 상태 : 아래와 같이 캘리브레이션 유무를 표시합니다.
상태 | 화면 | 설명 |
보정전 |
| 캘리브레이션이 수행되지 않았습니다. |
보정후 |
| 캘리브레이션이 수행되었습니다. |

-  (Lock)버튼: 캘리브레이션과 관련된 모든 버튼들을 동작할 수 없게 합니다.
(Lock)버튼: 캘리브레이션과 관련된 모든 버튼들을 동작할 수 없게 합니다.
n Calib Points
보정점에 대한 영상좌표와 로봇의 교시 데이터를 입력합니다.
영상 좌표에서의 보정점의 위치는 “Setup” 버튼을 클릭하여 패턴 인식을 수행하거나  버튼을 클릭하여 타원 피팅을 수행하여 설정합니다. 로봇 좌표계에서의 보정점의 위치는 각 보정점의 위치를 직접 입력하여 설정합니다. 입력되는 좌표는 선택된“Coordinate”에 따라 다르니 유의바랍니다.
버튼을 클릭하여 타원 피팅을 수행하여 설정합니다. 로봇 좌표계에서의 보정점의 위치는 각 보정점의 위치를 직접 입력하여 설정합니다. 입력되는 좌표는 선택된“Coordinate”에 따라 다르니 유의바랍니다.
n Test
캘리브레이션이 수행 되었다면, 현재 마우스 포인트의 영상 좌표 위치와 로봇 좌표계 기준의 현재 마우스 포인트 위치가 출력됩니다.
n Coordinate
카메라 운영환경별 로봇좌표계를 설정합니다.
설정 가능한 좌표계는 카메라 운영환경(설치 및 지향방향)에 따라 6개로 구성됩니다.

n Direction
캘리브레이션할때의 좌표축 방향을 설정합니다.
콤보박스를 선택하면, 상태 창의 그림이 선택된 좌표축 방향에 맞게 변경됩니다.

※작업환경별 “Coordinate”,”Direction” 설정 방법은 표 1을 참조하시기 바랍니다.
※일반적으로 카메라가 로봇 작업영역 상단에 고정되는 프레스 센터링용 비전 시스템은 XY-Coord(RZ-) Coodinate를 적용하고, 카메라 배치 방향에 따라 “Direction”은 A ~ D type 중 선택하여 적용하면 됩니다.
<카메라 운영환경에 따른 좌표계 및 방향 설정>
카메라 운영 환경 | 영상기준 로봇좌표계 및 보정점 설정위치 | 카메라 지향 방향 | ||||
A-Type | B-Type | C-Type | D-Type | |||
|
|
|
| |||
XY-Coord (RZ-) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||
XY-Coord (RZ+) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||
YZ-Coord (RX-) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||
YZ-Coord (RX+) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||
ZX-Coord (RY-) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||
ZX-Coord (RY+) |
| 로봇 좌표계 |
|
|
|
|
보정점 설정위치 |
|
|
|
| ||










































n All Calib
체크박스를 선택하면, 모든 모델에 대하여 동일한 캘리브레이션 데이터를 적용합니다.
체크 박스를 해제하면, 특정 캘리브레이션 데이터를 복사하거나, 해당 모델만 별도로 보정할 수 있습니다.
n Setup
이 버튼은 한번 클릭하면 “Search”가 되고, 다시 클릭하면 “Setup”이 되는 토글방식 버튼입니다.
“Setup”을 클릭하면 3개의 검색창과 각 검색창의 좌표축이 표시됩니다.
3개의 보정점을 인식할 수 있도록3개의 검색창을 적절히 배치 시키고, 각 보정점의 중심에 좌표축을 배치 시키십시오. 자세한 설명은 “4.4.2.4.1 보정점 패턴 인식 방법”을 참조하십시오.
각 검색창 및 좌표축 배치가 완료되었다면, “검색” 버튼을 클릭합니다.
만약 검색 작업이 실패하면, 실패한 보정점을 다음과 같은 대화상자로 출력합니다. 사용자는 실패한 보정점을 쉽게 구별할 수 있도록 “Setup”, “Search” 과정을 재시도 하십시오.

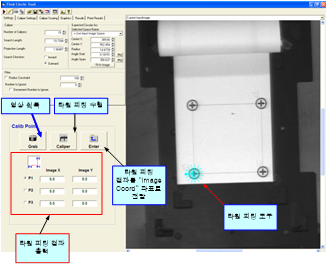
n 
타원 피팅에 의해 보정판에 존재하는 원의 중점을 측정하는 방법입니다. “Calib” 탭에서 선택한 “Coordinate”, “Direction” 정보에 의해 설정된 P1, P2, P3 위치에 타원 피팅 도구를 배치 시킨 뒤 “Caliper”버튼을 클릭합니다. 자세한 설명은 “4.4.2.4.2 타원 피팅 방법”을 참조하십시오.
n Input
보정점을 직접 입력했거나 특정 캘리브레이션 데이터를 복사하여 사용했을 경우, 캘리브레이션을 수행할 데이터를 입력하는 기능을 합니다.
n Calibration
보정점의 영상좌표와 로봇좌표의 입력이 완료되었다면, 이 버튼을 클릭하여 카메라 캘리브레이션을 수행합니다. 만약 캘리브레이션을 수행한RMS 값이 “RMS Error Limit” 보다 작다면 아래와 같은 대화상자가 출력되고, 카메라 캘리브레이션이 완료됩니다. “RMS Error Limit”의 설정은 3.6.5 “Detail” 탭을 참조하십시오.

RMS 에러가 “RMS Error Limit” 보다 크면, 다음과 같은 경고창이 발생 합니다. 영상좌표 및 로봇좌표를 재설정하시어, 다시 캘리브레이션을 수행하십시오.
