2.1.2. 공통좌표계 설정
2.1.2. 공통좌표계 설정
로봇간 Arm간섭 검지를 위해서는 협조제어를 위한 공통좌표계 설정이 필요합니다.
1) 공통좌표계를 설정하기 전, 뾰족한 툴을 준비하여 로봇의 캘리브레이션을 완료하십시오.
(『[F2]: 시스템』 → 『6: 자동 캘리브레이션』 → 『1: 축 원점 및 툴 길이 최적화』)
2) 자동 캘리브레이션으로 정확한 툴 정보를 찾아낸 상태에서 3점을 교시하십시오.
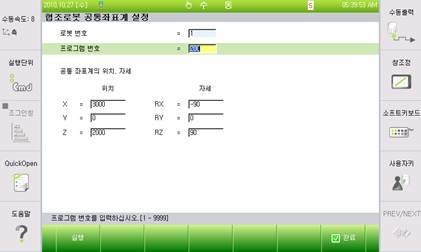
3) 『[F2]: 시스템』 → 『6: 자동 캘리브레이션』 → 『5: 협조로봇 공통좌표계 설정』에서 3점을 교시한 프로그램으로 공통좌표계를 설정합니다.
4) 자세한 내용은 『Hi5a “협조제어” 기능설명서』를 참고하시기 바랍니다.
상대 로봇과 자신의 로봇이 모두 공통좌표계 설정이 되어 있어야 합니다. 자신의 로봇이 협조제어가 무효이거나 공통좌표계 설정이 되지 않은 경우에는 조그와 플래이백이 되지 않습니다.
발생 가능한 에러 원인 | 자신의 로봇이 협조제어 “무효”상태이거나 공통좌표계를 설정하지 않고 Arm간섭검지 조건을 설정한 경우 |
에러 메시지 | E1342 로봇 협조 상태, 공통 좌표계가 무효임 |
조치 방법 | 본 기능을 사용하기 위해서는 반드시 로봇 협조와 공통좌표계 설정을 선행하여야 합니다. |