2.1.4. 암 간섭 영역 설정
2.1.4. 암 간섭 영역 설정
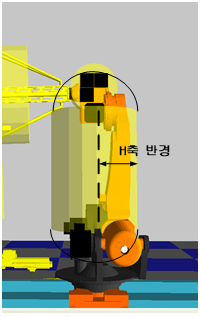
암 간섭 영역의 모델은 양쪽 면이 반구(Hemi-Sphere)로 이루어진 원통으로 되어 있습니다. 예를 들어 H축의 경우에 아래와 같이 H축의 조인트 위치부터 V축의 조인트 위치까지를 반경을 설정하여 모델링 할 수 있습니다.

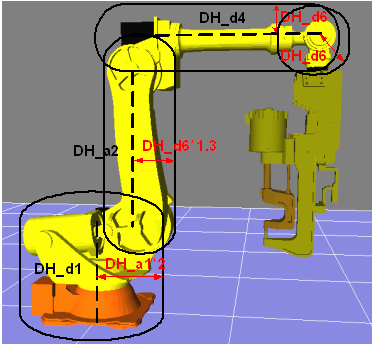
로봇 본체 암에 대한 원통 링크 모델은 S축, H축, V축 그리고 B축에 적용됩니다. 각 축의 반경의 기본 설정 값은 다음과 같이 결정되었습니다. 추가적인 설비가 로봇에 장착되었을 경우 해당 축의 반경을 기본 값 보다 크게 설정하여 사용하시기 바랍니다.
l S축 반경: S축의 회전 중심에서 H 축 조인트 거리의 두 배 설정
l H축 반경: B축 회전 중심에서 Flange면까지의 거리의 1.8배
l V축 반경: B축 회전 중심에서 Flange면까지의 거리
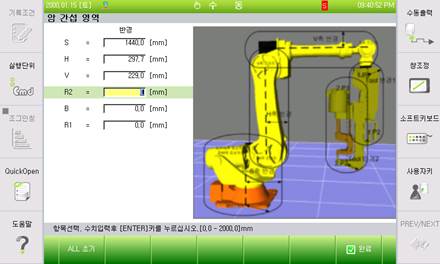
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『7: 간섭방지』→ 『2: 암 간섭방지』→ 『2: 암 간섭 영역』을 선택하면 현재 기본으로 설정되어 있는 반경을 볼 수 있습니다. 기본 설정 값을 변경하고자 하는 경우 설정 값을 입력하고 『[F7]: 완료』 키를 누릅니다. 기본 값으로 복귀하고자 하는 경우에는 『[F1]: ALL초기』를 선택하면 기본 값을 다시 불러 올 수 있습니다.
현재 로봇 암 간섭은 S, H, V축의 설정 값으로 모든 축을 검지할 수 있도록 지원하고 있습니다.
만일 기본값보다 줄여서 사용하고자 하는 경우 매우 주의를 요합니다. 예를 들어 HS220같은 시리얼 링크의 H축은 위의 그림과 같이 S축의 중심에서 오른쪽으로 오프셋이 있습니다. H축의 간섭검지 영역은 상기의 그림과 같이 S축 회전 중심에서 H축 링크를 따라 V축 회전 중심까지 잇는 선분을 기준으로 설정되기 때문에 H축 반경은 S축 회전 중심에서 H축 링크를 모두 포함 할 수 있는 크기로 설정되어야 합니다.