2.1.5. 툴 간섭 영역 설정
2.1.5. 툴 간섭 영역 설정
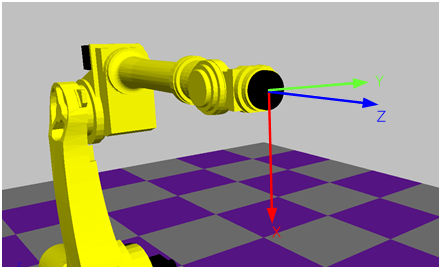
그림 2.1 플랜지 좌표계
각 툴 번호에 대한 툴 간섭 영역을 설정하기 위해서는 로봇 플랜지 좌표계를 기준으로 작성합니다. 로봇이 기준자세에 있는 경우 플랜지 좌표계는 플랜지 면에 수직하여 밖으로 나가는 방향이 Z이고 아래방향이 X방향 그리고 로봇의 왼쪽 방향이 Y방향입니다.
툴 번호 하나 당 4개의 간섭 영역을 설정할 수 있습니다. 로봇 프로그램에서 사용하는 툴 번호는 반드시 툴 간섭 영역을 설정하십시오. 이 설정이 되어 있지 않으면 툴 간섭 검지가 되지 않습니다.
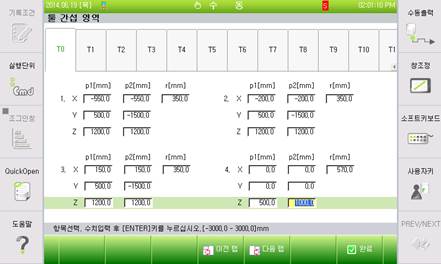
1) 서보건 설정의 예
툴 간섭 영역의 설정은 툴 플랜지(Tool Flange) 면에 설정된 좌표로부터 시작점과 종료 점 그리고 반경을 설정하여 툴의 간섭영역을 설정할 수 있습니다. 툴 번호 하나 당 4개의 간섭 영역을 설정할 수 있습니다.
플랜지 좌표계 방향과 설정 예는 아래의 그림을 참고하십시오.
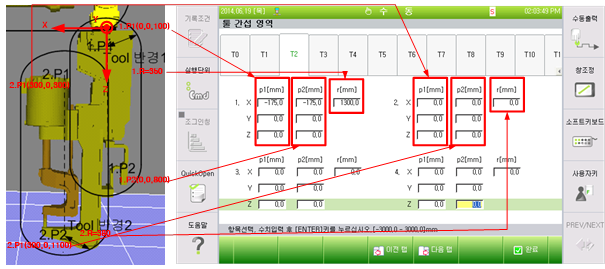
2) 행거 설정의 예
l 툴 간섭 설정 영역을 1개만 설정하는 경우
플랜지의 중심을 기준으로 대칭이 아닌 툴의 경우 툴 간섭 영역을 1개로 설정하고자 할 때는 툴 형상의 중심위치 및 중심위치와 툴의 모서리와의 최대거리를 반지름으로 설정하는 방법을 사용할 수 있습니다.
아래의 예에서 로봇 좌표계 기준으로 X=-175, Y=-485 이며 반경은 R1과 R2중에R1이 크므로 1250보다 다소 크게 1300으로 설정합니다. 반지름을 1300으로 설정하게 되면 원통의 각 면에 반구(hemi-sphere)가 설정되는 점을 감안하여 Z의 위치는 P1=(-175,-485,500), P2=(-175,-485,1000)를 각각 설정합니다.
그러나 상기와 같이 반지름을 크게 설정할 경우 툴의 실제 모양보다 불필요하게 크게 설정되는 것을 피할 수 없습니다. 따라서 정밀하게 툴의 영역을 설정할 필요가 있을 경우에는 여러 개로 나누어서 모델링 하여야 합니다.
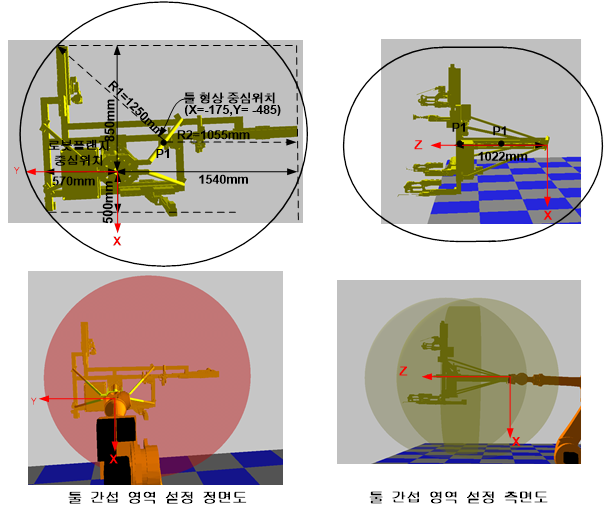
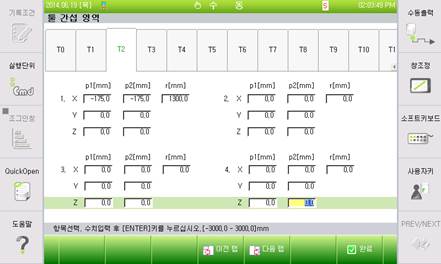
l 툴 간섭 설정 영역을 4개로 설정하는 경우
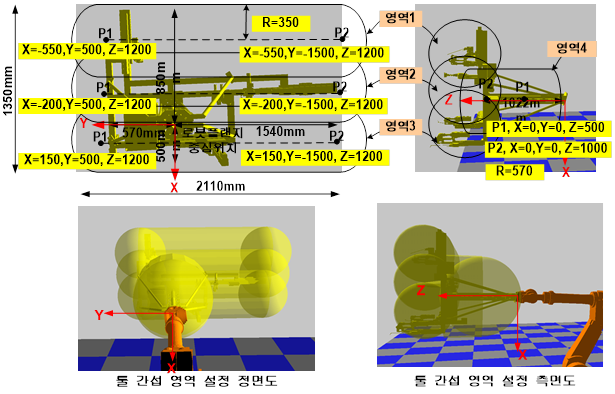
행거와 같이 툴이 큰 경우 영역을 나누어 설정하면 툴 간섭영역을 과대하게 설정하는 것을 방지할 수 있습니다. 아래의 예와 같이 가로 2110mm세로 1350mm의 툴이라고 생각하면 세로 영역을 3등분하여 약 350mm의 반지름을 갖는 원통 3개의 영역1~3으로 모델링 할 수 있습니다. 마지막으로 플랜지에서 툴까지의 옵셋을 영역 4로 설정하면 아래와 같은 설정이 가능합니다.