2.1. 사용환경 설정
2.1. 사용환경 설정
서보툴에 대한 체인지 환경을 설정합니다.
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『11: 서보툴 체인지』 → 『1: 사용환경 설정』
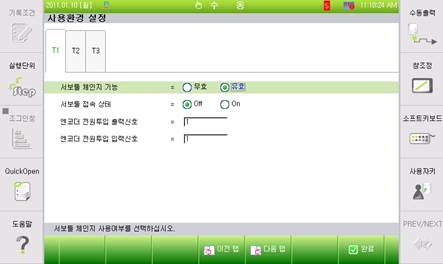
그림 2.1 서보툴 체인지 사용환경 설정
(1) 서보툴 체인지 기능
부가축에 대한 체인지 기능의 사용여부를 설정합니다.
(2) 서보툴 접속 상태
현재 서보툴의 접속 또는 분리 상태를 모니터링합니다. 또한, 현재 서보툴이 접속된 경우에는 강제로 분리할 수 있으며 이를 위해서는 모터Off 상태에서 <Off> 로 변경한 후, 제어기 전원을 재투입하면 됩니다. 이와 반대로 서보툴이 분리된 경우에 강제 접속은 불가합니다.
(3) 엔코더 전원투입 출력신호
접속 또는 분리시 엔코더 전원 제어를 위한 출력 신호를 할당합니다. 이 신호가 On인 경우 엔코더5V전원선을 제어하는 릴레이가 동작합니다.
(4) 엔코더 전원투입 입력신호
접속 또는 분리시 엔코더 전원 제어 상태를 확인하기 위한 입력 신호를 할당합니다. 엔코더 5V 전원선을 제어하는 릴레이의 동작 여부를 확인합니다.
참고사항)
l 입출력 신호의 논리는 『[F2]: 시스템』 → 『2: 제어 파라미터』 → 『2: 입출력 신호 설정』 → 『1: 입력 신호 속성』/『2: 출력 신호 속성』에서 설정할 수 있습니다.
l BD530의 TBIO 신호는 각각4097~4100번으로 설정 가능합니다.
l 로봇 프로그램에서 TBIO 신호는 각각 SI[101~104]/SO[101~104]로 대응됩니다.