2.7. 접속/분리 타이밍
2.7. 접속/분리 타이밍
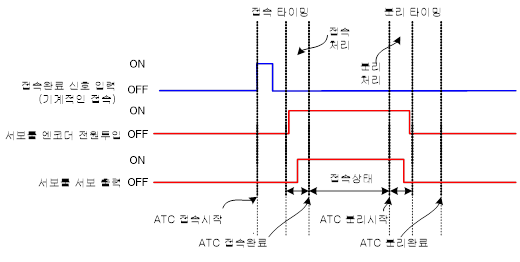
그림 2.5 서보툴 체인지 접속/분리 타이밍
(1) 접속
접속명령(TOOLCHNG ON)을 실행중 로봇과 서보툴이 기계적으로 접속이 되면 접속완료 신호를 입력받고 제어기 내부적으로 접속 처리를 수행합니다. 또한, 서보툴축 구동을 위한 엔코더 전원 투입과 모터 ON 동작이 추가됩니다.
(2) 분리
분리명령(TOOLCHNG OFF)은 접속과 상반되는 시퀀스를 가지고 분리 처리를 수행합니다.
그림 2.5 서보툴 체인지 접속/분리 타이밍
(1) 접속
접속명령(TOOLCHNG ON)을 실행중 로봇과 서보툴이 기계적으로 접속이 되면 접속완료 신호를 입력받고 제어기 내부적으로 접속 처리를 수행합니다. 또한, 서보툴축 구동을 위한 엔코더 전원 투입과 모터 ON 동작이 추가됩니다.
(2) 분리
분리명령(TOOLCHNG OFF)은 접속과 상반되는 시퀀스를 가지고 분리 처리를 수행합니다.