2.8. 포지셔너 캘리브레이션 명령 (PosiCal)
2.8. 포지셔너 캘리브레이션 명령 (PosiCal)
포지셔너가 로봇과 동기동작을 하기 위해 필요한 포지셔너 캘리브레이션을 수행하는 명령입니다. 일반적으로 포지셔너 캘리브레이션은 설정 대화상자를 통해 수행합니다. 그러나, 서보툴 체인지로 포지셔너가 변경되는 경우에는 로봇 운전 중 캘리브레이션이 변경되어야 합니다. 이를 로봇 프로그램 상에서 수행하기 위한 명령이 포지셔너 캘리브레이션 명령(PosiCal)입니다.
(1) PosiCal 명령어
표 2.2 PosiCal 명령어 파라미터
PosiCal Prog=<캘리브레이션 프로그램 번호>,Station=<Station 번호> | ||
캘리브레이션 프로그램 번호 | 1~9999 | 포지셔너 캘리브레이션 프로그램 번호 |
Station 번호 | S1~S3 | 캘리브레이션 할 station 번호 |
(2) 포지셔너 캘리브레이션 사용 예시
- 캘리브레이션 할 포지셔너와 로봇을 연결합니다.
- 포지셔너 캘리브레이션 프로그램을 작성합니다.
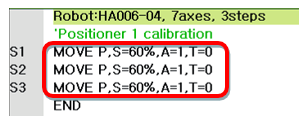
그림 2.6 축 포지셔너 캘리브레이션 프로그램
- 『명력입력』 → 『아크』 → 『PosiCal』을 선택하여 PosiCal명령어를 삽입하고 실행합니다. 또는 『[F2]: 시스템』 → 『6: 자동정수 설정』 → 『2: 포지셔너 캘리브레이션』 대화상자로 진입하여 작성된 프로그램으로 포지셔너 캘리브레이션을 실행합니다.
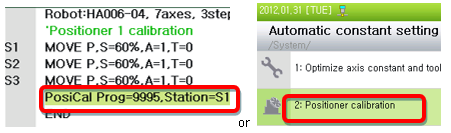
그림 2.7 포지셔너 캘리브레이션 실행
- 포지셔너 동기가 정상적으로 되는지 부가축 동기 조그동작으로 확인합니다.
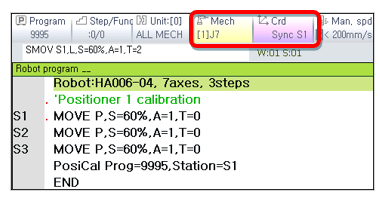
그림 2.8 포지셔너 동기 시 TP화면 모습
- 포지셔너가 회전할 때 로봇이 정확히 동기 동작을 실행하는지 확인
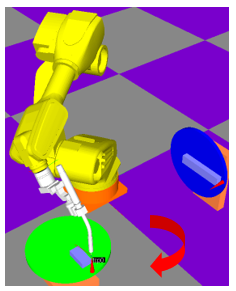
그림 2.9 포지셔너 동기동작 확인
- 실제 작업프로그램에서 TOOLCHNG 명령으로 포지셔너를 변경한 후 PosiCal 실행
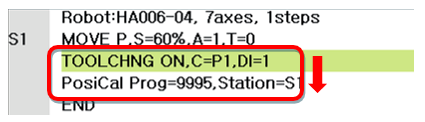
그림 2.10 툴 체인지 후 포지셔너 캘리브레이션 실행의 예시