2.3. 축 원점
2.3. 축 원점
각각의 서보모터에 대한 축 원점를 관리합니다.
『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『11: 서보툴 체인지』 → 『3: 축 원점』
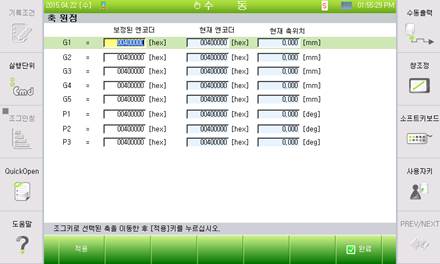
그림 2.3 서보툴 축 원점 설정
서보툴을 접속하면 해당 부가축의 축원점이 체인지할 서보툴의 축 원점으로 자동 갱신됩니다. 즉 『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『11: 서보툴 체인지』 → 『3: 축 원점』의 설정값으로 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『2: 축 원점』의 값을 갱신합니다.
이 밖에도 해당 부가축의 소프트 리밋, 엔코더 옵셋, 서보 파라미터, 가감속 파라미터도 위에서 언급한 축 원점과 같이 서보툴 접속 시 체인지할 서보툴의 값으로 자동 갱신됩니다.