10.4.6.2. PALPU
10.4.6.2. PALPU
PALPU문은 팔레타이즈 작업 실행 시 작업물을 집은(픽킹) 후 작업물을 들어올리는 높이를 입력한 양만큼 쉬프트하는 기능입니다. 이 기능은 현재 쌓을 단의 높이와 비교하여 최적의 팔레타이즈 경로를 수행할 수 있습니다.
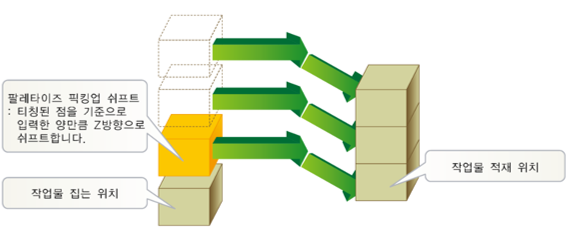
그림 10.13 팔레타이즈 픽킹업 쉬프트
설명 | 팔레타이즈 픽킹업 쉬프트 | ||
문법 | PALPU P=<팔레트 번호>,SL=<개시단수>,SH=<쉬프트량> | ||
파라미터 | 팔레트 번호 | 팔레트 엔트리 번호 | 1~16 |
개시단수 | 집어 올리기를 시작할 단의 수 (1-base) | 1~100 | |
쉬프트량 | 픽킹 상승 시 쉬프트값 | -2000.0 ~2000.0 | |
사용 예 | PALEND P=1,SL=4,SH=1000 | ||
비고 | 이 기능은 항상 PAL와 PALEND 사이에 있어야 합니다. | ||

l 이 기능을 사용하기 위해서는 『[F2]: 시스템』 → 『5: 초기화』 → 『3: 용도설정』 항목에서 팔레타이징을 유효로 설정하셔야만 합니다.
l 이 기능을 사용하기 전 항상 『[F2]: 시스템』 → 『4: 응용 파라미터』 → 『3: 팔레타이징』 → 『1: 팔레타이즈 패턴 레지스터』에 데이터 값을 확인하십시오. 설정 값이 잘못 되어있을 경우 로봇이 원하지 않는 작업을 수행할 수 있습니다.
l 스텝 옵션이 PU인 스텝에 한정되어 반영됩니다.