2.3.2. 초기 설정
2.3.2. 초기 설정
로봇을 처음 설치했을 때나 로봇 제어기가 정상적으로 동작하지 않는 경우에만 수행하며 그 절차는 다음과 같습니다.
(1) 티치펜던트의 제목 표시창이 수동모드인지 확인합니다. 만약 자동모드이면 티치펜던트의 [REMOTE/AUTO/MANUAL] 스위치를 [MANUAL]방향으로 전환합니다.
(2) 『[F2]: 시스템』 → 『5: 초기화』 → 『1: 시스템 초기화』를 선택합니다. 시스템 초기화를 하면 제어파라미터 파일, 기계파라미터 파일 뿐만 아니라 모든 프로그램이 삭제되므로 처음 시스템을 설치할 때 이외는 사용하지 마십시오.
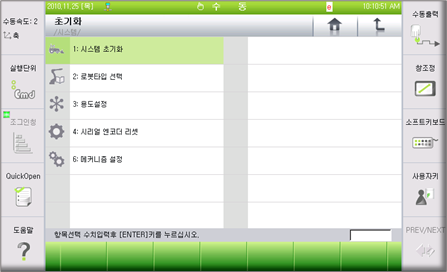
그림 2.20 초기화 메뉴 화면
(3) 제어기가 부착된 로봇의 타입을 선택합니다.
(4) 부가축이 있을 경우, 부가축 수를 입력하고 『[F7]: 완료』키를 누릅니다.
(5) 제어기 앞면의 좌측 상단에 있는 메인 전원 스위치를 이용하여 제어기의 전원을 OFF → ON합니다.
(6) 『[F2]: 시스템』 → 『3: 로봇 파라미터』 → 『4: 엔코더 보정』에서 엔코더 옵셋 보정을 수행합니다. 로봇 위치가 기준자세가 아니어도 엔코더 보정을 실행해야 모터 ON이 가능합니다.
(7) 제어기 전원을 OFF → ON합니다.
(8) 모터에 전원을 공급합니다. (Motor ON)
(9) 수동조작에 의해 로봇을 기준자세로 움직인 다음, 엔코더 옵셋 보정을 다시 한번 실행합니다. 이 값은 Motor 교체 시에 엔코더를 리셋하는 위치로 이용됩니다.
(10)티치펜던트의 [SHIFT[고속]+[프로그램/스텝]키를 눌러 프로그램 9999번을 선택한 다음, 한 스텝을 기록해 둡니다. 이 위치는 로봇의 기준위치로 활용됩니다.

l 시스템 초기화를 하기 위해서는 엔지니어에게 문의하십시오.