2.3.5. 스텝 전/후진
2.3.5. 스텝 전/후진
스텝 전/후진이란 수동모드에서 기록된 프로그램을 재생하는 것을 의미합니다. 스텝 전/후진 기능을 사용하면 기록된 프로그램의 경로와 상호 인터록 관계를 안전한 속도 범위에서 확인 할 수 있습니다.
스텝 전/후진에는 실행단위에 따라 총 3가지 모드가 있습니다.
실행단위 Cmd: 프로그램을 한 행씩 실행
실행단위 Step: 프로그램을 한 스텝씩 실행
실행단위 End: 프로그램을 END 명령어까지 실행
실행단위가 Cmd 와 Step 으로 설정 되어 있는 경우 로봇은 설정된 Accuracy 영역을 무시하고 기록된 스텝까지 도달하지만 End 로 설정되어 있는 경우는 자동모드의 재생시와 동일한 경로로 동작합니다.
Cmd/Step 모드에서 스텝 전/후진을 수행할 때는 아래 그림과 같이 코너링이 없는 경로 상에서 로봇이 동작합니다. 코너링에 관한 자세한 내용은 7.3.6. Accuracy 항목에 설명되어 있습니다.
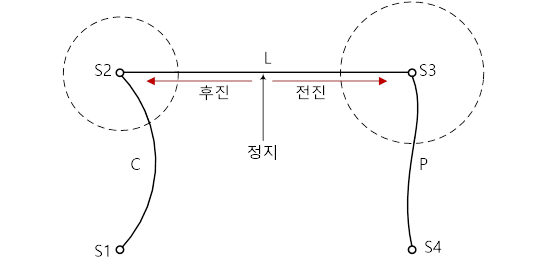
그림 2.24 Cmd/Step 재생 전/후진 경로
End 모드에서 스텝 전/후진을 수행하면 로봇 경로는 아래의 그림과 같이 정지 위치에 따라 로봇 경로가 달라집니다. 즉, 로봇이 코너링이 아닌 다른 곳에서 정지 한 후 전진을 실행하면 원래 코너링의 경로를 복구하지만, 후진을 실행하였을 경우 기록된 스텝까지 이동하며 이 때 기록된 스텝에서는 정지 후 즉각 이전 스텝으로 이동합니다. 로봇이 코너링에서 정지 한 후에는 전/후진시 모두 이전의 코너 경로를 유지합니다. 다만, 후진을 하였을 경우 코너링 시작점에서 로봇이 자동으로 정지하고 이 때 TP 의 해당 스텝 좌측에 ‘a’라고 표시가 됩니다 (이하 TP 화면 참조).
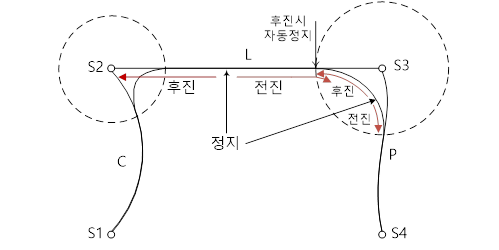
그림 2.25 End 재생 전/후진 경로
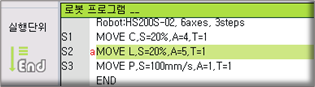
그림 2.26 코너링에서 후진 후 코너시작점에서 자동정지된 상태
코너링에서 정지 후 전진을 실행하면 원래 코너경로를 따라 로봇이 동작합니다. 여기서 다시 후진을 실행하다가 이전 스텝에 다 도달하지 못한 상태에서 다시 전진을 실행할 때는 아래 그림과 같이 원래의 코너 경로를 만들지 못하는 경우가 있습니다. 즉, 스텝의 거리가 원래 보다 작아져서 기존의 Accuracy 조건을 만족할 수 없으면 원래의 코너경로 보다 작게 코너경로가 만들어 집니다.
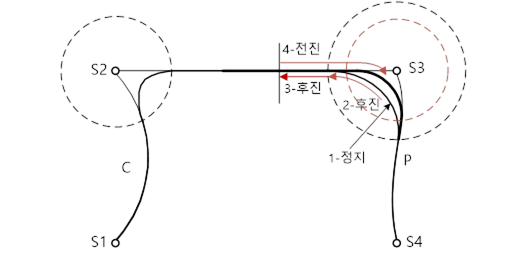
그림 2.27 스텝 후진 후 전진 시 로봇 경로 변경 예시
“스텝 전/후진시 최고속”과 “스텝 전/후진시 펑션”실행 여부는 조건설정 메뉴에서 설정할 수 있습니다.
스텝 전/후진시 최고속은 수동 속도에 설정한 값과 동일합니다.
스텝 전/후진시 펑션 설정은 Off, On, I On 의 3가지 방식이 있습니다.
Off : 스텝 전/후진시 펑션 실행을 하지 않습니다.
외부 I/O 조건과 무관하게 따라서 로봇 경로만 확인할 수 있습니다.
외부 시스템과의 인터록이 동작하지 않으므로 주의해야 합니다.
On : 모든 펑션실행을 합니다.
외부 인터록이 완성된 후 사용합니다.
I On: 입력 대기 펑션만 실행합니다.
외부 인터록에 의한 안전 확인이 필요할 때 사용합니다.