2.3.4. 수동운전 속도
2.3.4. 수동운전 속도
수동모드에서 가능한 로봇 조작에는 수동 조그 조작과 스텝 전/후진 운전이 있습니다. 각각에 대한 속도조절 방법은 다음과 같습니다. TP 우측 상단에 아래와 같이 속도 창에 현재 설정된 속도가 표시 됩니다.

상단의 ‘수동속도’ 는 수동모드에서만 표시되며 자동모드 일 경우 ‘재생속도’로 표시가 변경됩니다. 속도 창 하단 좌측 5는 조그 속도 레벨을 나타내고, 우측250 mm/s는 스텝 전/후진시의 제한속도를 의미합니다. 여기서 제한 속도라 함은 스텝 전/후진시 제한 되는 속도를 나타내며 좌측의 < 표시는 같거나 작음을 의미합니다. 예를 들어, 기록된 스텝의 속도가 1000 mm/s 이고 수동모드의 제한 속도가 250 mm/s 라면 스텝 전/후진시 스텝의 이동 속도는 250 mm/s 로 제한됩니다. 만약, 이 때 기록 속도가100 mm/s 라면 이 속도는 수동속도인 250 mm/s 보다 작으므로 로봇은 100 mm/s 로 이동하게 됩니다.
조그 조작에는 [SPEED] 키를 사용하여 속도를 level 1 에서 level 8까지 level 1 단위로 조절 할 수 있습니다. 이 때에도 로봇 툴과 링크의 최고속은 250 mm/s 이하로 제한됩니다.
스텝 전/후진에는 [CTRL] + [SPEED] 키를 사용하여 속도를 50 mm/s 에서 250 mm/s까지 50 mm/s 단위로 조절 할 수 있습니다. 로봇 툴과 링크의 최고속은 설정 값 이하로 제한됩니다.
속도 조절은 이상에서 설명한 바와 같이 키조작으로 가능하지만 터치방식으로도 가능합니다. 수동속도 창을 터치하면 아래와 같은 창이 나타나 속도를 편리하게 조절할 수 있습니다.
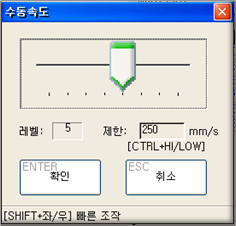
그림 2.23 수동속도 설정 창
