2.3.3. 수동 조작
2.3.3. 수동 조작
수동 조그키를 이용하여 로봇에 작업 내용을 지시하고 지시된 작업 내용을 확인하는 모든 행위를 말하며 그 절차는 다음과 같습니다.
(1) 안전펜스 내에 사람이 없는지, 로봇 동작범위 안에 방해되는 물체가 없는지 확인합니다.
(2) 티치펜던트의 제목 표시창이 수동모드인지 확인합니다. 자동모드이면 티치펜던트의 [REMOTE/AUTO/MANUAL]스위치를 [MANUAL] 방향으로 전환합니다.
(3) [SHIFT[고속]+[프로그램/스텝]키를 눌러 원하는 프로그램을 선택합니다. (1-9999)

그림 2.21 프로그램 선택 창 실행화면
▶ 프로그램 List 확인방법
1: 목록보기/감추기: [프로그램] 를 선택하면 아래와 같이 프로그램 List가 나타납니다.
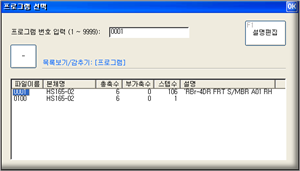
그림 2.22 목록이 표시된 프로그램 선택 창
2: 프로그램 선택 창에서 [SHIFT[고속]+[프로그램/스텝]키를 한번 더 눌러도 상기프로그램 선택 창이 나타납니다.
3: 『[F1]: 서비스』 → 『5: 파일관리』 선택하면 모든 파일이 나타납니다.
4: R코드 17번으로도 모든 파일이 나타납니다.
(4) 티치펜던트의 [Motor ON] 버튼을 누른 후, [MOTOR ON] 램프의 점멸 상태를 확인합니다. 이 조작은 로봇 각축의 모터에 서보전원을 공급하기 위한 준비상태입니다.
(5) 티치펜던트 후면에 있는 [ENABLE] 스위치를 누른 후, [MOTOR ON]램프의 점등상태를 확인합니다. 이 조작에 의해 MSPR, MSHP 릴레이가 동작하고, 모터의 브레이크가 해제되며 서보 ON 상태가 됩니다. 즉, 로봇을 움직일 수 있는 상태가 됩니다.
(6) 속도레벨이나 좌표계의 이동조건에 따라 로봇을 움직이는 조작이 가능합니다.
(7) 로봇의 현재위치를 기억시키고자 하는 위치에서 [위치수정/기록]키를 누르면 스텝이 기록됩니다.
(8) 『[F6]: 명령입력』 키로 스텝에 필요한 펑션(Function)을 기록합니다.
(9) [STEP FWD/STEP BWD]키를 이용하여 작업내용을 확인합니다. [STEP FWD/STEP BWD] 키는 눌려져 있는 동안 로봇이 이동하고 목표 스텝에 로봇이 도달하면 해당 명령어 앞에 수행완료 마크인『.』이 표시되며 정지합니다.