4.3.10. 팔레타이징, 간지 모션 프로그램
4.3.10. 팔레타이징, 간지 모션 프로그램
팔레타이징, 간지 모션 프로그램은 실제 로봇을 움직이기 위한 MOVE 문들의 조합으로 구성되어 있습니다. 표준 프로그램은 연속적인 동작을 위해 4개의 위치값(Package, Pick up, Near place down, place down)을 사용합니다. 이들 4개의 값은 앞서 4.3.5 홈포지션, 작업물 위치 프로그램, 4.3.8 팔레트 좌표계 생성 프로그램과4.3.4 각종 변수, 신호 초기화에서 지정한 들어올릴 높이 값을 사용하여 정의합니다. 그리고 Home Position은 다른 작업물이 진입했거나, 간지 삽입을 하러 가야하는 등 연속적이지 않은 동작을 수행해야 될 경우에 이동할 초기 위치를 의미하며, 이는 3~5 번 라인을 보면 변동이 있을 경우에만 수행하도록 되어 있습니다.
만일, S4. Up과 S5. Near Place Down 사이에 다른 경유점을 추가하고자 할 때에는S4 와 S5 사이에 새로운 MOVE문을 추가하여 사용하면 됩니다.
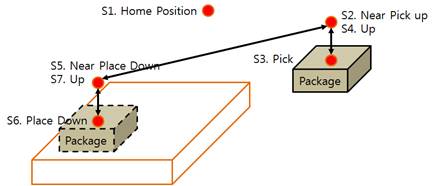
그림 4.5 팔레타이징 동작 위치값
Program 7 팔레트 모션 프로그램
Program File Format Version : 1.6 MechType: _MECHTYPE TotalAxis: _TOTAL_AX AuxAxis: _AUX_AX 1 ''Palletize Job Program 2 CALL 701 '모션 파라미터 설정 3 IF V%[6]<>V%[5] OR V%[7]<>V%[8] THEN 4 S1 MOVE P,P[1001],S=90%,A=1,T=0 'Home Position 5 ENDIF 6 S2 MOVE P,P[1002],S=90%,A=5,T=0 'Near Pick up 7 S3 MOVE L,P[1003],S=90%,A=0,T=0 'Pick 8 CALL 0051 'Vaccum On 9 S4 MOVE L,P[1004],S=90%,A=5,T=0 'Up 10 S5 MOVE P,P[1005],S=90%,A=5,T=0 'Near place down 11 S6 MOVE L,P[1006],S=90%,A=0,T=0 'Place down 12 CALL 0050 'Vaccum Off 13 V%[31] = V%[31] + 1 '카운트 증가 14 V%[8] = V%[7] '이전 적재물, 간지 번호 저장 15 S7 MOVE L,P[1007],S=90%,A=5,T=0 'Up 16 END |