4.3.8. 팔레트 좌표계 생성 프로그램
4.3.8. 팔레트 좌표계 생성 프로그램
HRpal 혹은 HRpalware 에서 생성된 패턴의 시프트 데이터는 모두 1번 적재물의 위치에 대한 상대적인 시프트 값으로 기록되어 있습니다. 그러므로 팔레트 상에서 최초 1번 위치(혹은 티칭 위치, *로 표기됨)가 적재될 위치를 기준으로 하여 사용자 좌표계를 만드는 작업이 필요하며, 이는 팔레트 좌표계 생성 프로그램(601~616 번 JOB 프로그램) 파일에 정의되어 있습니다.
사용자 좌표계는 3개의 좌표값을 기록하는 것으로 생성할 수 있으며, 기록해야할 좌표값은 아래와 같습니다(Program 5, 그림 4.3).
l P1 – 가장 최초에 적재를 시작할 적재물의 위치를 기록합니다. 이는 동시에 사용자 좌표계상의 원점입니다.
l P2 – 1번 적재물을 기준으로 하여, X 축의 한 점을 설정합니다.
l P3 – 1번 적재물 기준 X-Y 평면 상의 한 점을 설정합니다.
사용자 좌표계는 기본적으로 로봇 좌표계(오른손 좌표계)와 동일하게 정의합니다. HRpal 혹은 HRpalware 화면에 보이는 패턴의 티칭 위치점(* 표시)에 오른손 좌표계를 적용한 형태로 사용자 좌표계를 정의하면 올바른 형태로 동작합니다.
Program 5 사용자 좌표계 기록을 위한 JOB 프로그램
Program File Format Version : 1.6 MechType: _MECHTYPE TotalAxis: _TOTAL_AX AuxAxis: _AUX_AX 1 ''HHI User Coordinate Define Program 2 PRINT #0,"사용자 좌표계를 포즈상수값을 사용하여 기록하세요. 완료 후 PRINT, STOP은 삭제 하세요." 3 STOP 4 P1=P* 'Origin 5 P2=P* 'X-axis 6 P3=P* 'X-Y plane 7 MKUCRD 1,P1,P2,P3 8 SELUCRD 1 9 P4=P1 10 P4.CFG.CRD=4 11 END |
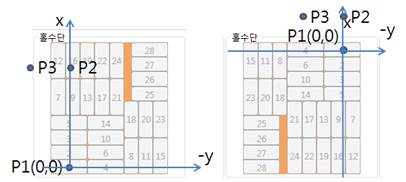
그림4.3 사용자 좌표계 기록 예시


그림 4.4 오른손 좌표계의 구성 형태