6.4.7. B축 감속기 교환 방법 [HH007C]
6.4.7. B축 감속기 교환 방법 [HH007C]
(1) 제어기를 티칭모드로 하고, 운전준비 [ON] 상태로 합니다. 운전준비 [ON]이 안될 경우, 암이 낙하하지 않도록 하고, 충분히 고정되었는지를 확인해 주십시오. 이후로는(3)작업부터 합니다.
(2) 제어기 전원을 [OFF] 상태로 하고 1차 전원을 [OFF] 합니다.
(3) B, R1축 모터 브라켓의 볼트를 풀러 타이밍 벨트를 분리합니다.
(4) [그림 6.13]의 H/D HOUSING을 분해 후 웨이브제너레이터를 빼냅니다.
(5) [그림 6.14]의 BEARING SUPPORT HOUSING, BEARING HOUSING을 분해합니다.
(6) 손목부(WRIST BODY)를 빼내어 B축 감속기 고정부 볼트를 제거합니다.
(7) 감속기 내부에 웨이브제너레이터의 볼 경 두께 만큼 그리스(SK-1A) 9g 도포합니다.
(8) B축 감속기 교체하여 고정부 볼트를 체결합니다.
(9) 아래 그림과 같이 베어링 외륜, 내륜에 Threebond 도포 후 웨이브제너레이터 축에 베어링을 삽입합니다.
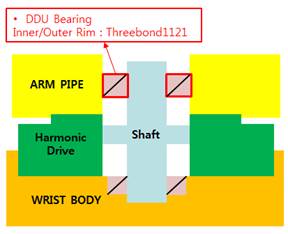
그림 6.15 B축 감속기 Threebond 도포 상세도[HH007C]
(10)웨이브제너레이터(교체)를 축에 조립 후 삽입합니다.
(11)손목부(WRIST BODY)를 암 파이프(ARM PIPE)에 삽입합니다.
(12)B,R1축 모터브라켓의 볼트를 조립하여 타이밍벨트의 장력을 맞춥니다.
(B축 벨트 : 3GT / 폭 : 6mm / 벨트 단위 질량 : 2.5 / Span 거리 : 193mm / 텐션 : 29N)
(R1축 벨트 : 3GT / 폭 : 6mm / 벨트 단위 질량 : 2.5 / Span 거리 : 119mm / 텐션 : 29N)
(13)로봇 동작에 문제가 없는지 확인합니다.
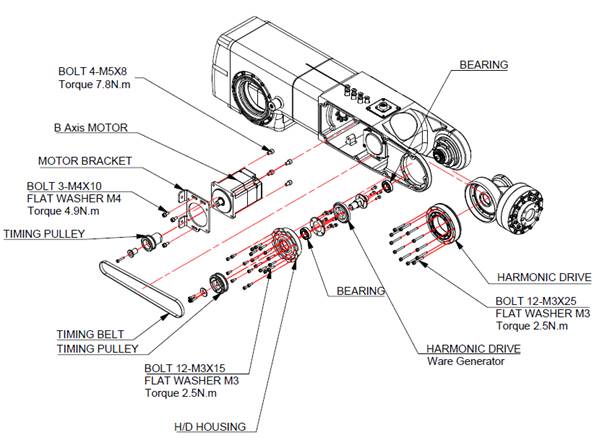
그림 6.16 B축 감속기 분해도[HH007C]