4.1.4. 조인트 공간
4.1.4. 조인트 공간
조인트 공간은 조인트 움직임 모니터링을 위한 작업 공간 또는 보호 공간으로 정의할 수 있습니다. 작업 공간은 조인트가 제한된 공간에서만 자유로울 수 있는 곳을 의미합니다. 그 외에, 보호 공간은 조인트가 진입하여 움직일 수 없는 제한된 공간입니다.
조인트 공간은 최대 4개의 공간으로 구성할 수 있으며 각 공간은 최대 8개의 축으로 구성됩니다. 각 공간은 정지 거리를 포함하여 구성해야 합니다. 각 공간은 파라미터 설정 또는 안전 I/O에 의해 활성화될 수 있습니다.

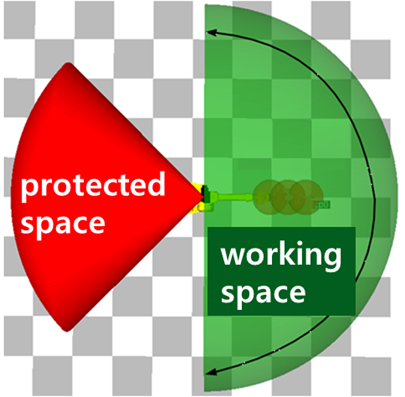
그림4.4 조인트 공간
조인트 공간에 구성된 TCP 속도도 모니터링해야 합니다. TCP 속도가 활성화된 공간의 한계값을 초과하는 경우 STO가 활성화됩니다.
조인트가 데카르트 공간을 위반하면 경계선에서의 정지 구성에 따라 반응합니다. 경계선에서 정지가 켜지면 STO가 활성화되고 로봇이 정지합니다. 그렇지 않으면 로봇이 정지하지 않고 안전 PLC로 알람을 전송합니다.
표 4‑4 조인트 공간 파라미터
조인트 공간 파라미터: 4개 공간 | ||
파라미터 이름 | 값 | 설명 |
명칭 | 명칭 문자열 | 최대 24글자 기본값=“Joint Space n“ ※ HRSafeSpace에서만 사용됨. 명칭은 로봇 제어기로부터 SafeSpace로 전달되지 않습니다. |
Type | 0,1 | 0=작업 공간(기본값) 1=보호 공간 |
Activation | 0~3 | 0=항상 꺼짐(기본값) 1=항상 켜짐 2=안전 IO 3=안전 필드버스 |
Max. TCP speed | 1~30,000 (mm/s) | 데카르트 TCP 속도의 한계 기본값: 30,000 |
TCP speed monitoring | 0,1 | 공구가 다음과 같을 때 TCP 속도 모니터링 0= 공간 안 1= 공간 밖 |
Stop at bound | 0,1 | 0=정지하지 않음 1 =정지(기본값) |
속성: 조인트 1~8 | ||
Monitoring On/Off | On/Off | 모니터링 활성화 Off=이 조인트는 모니터링되지 않음(기본값) On=이 조인트는 모니터링됨 |
Min | -360~360(°) 또는 -30,000~ 30,000(mm) | 조인트 공간의 하부 경계 기본값: -360 |
Max | -360~360(°) 또는 -30,000~ 30,000(mm) | 조인트 공간의 상부 경계 기본값: 360 |
조인트 공간의 범위는 로봇 제어기에서 설정된 소프트 한계로 간주해야 합니다. 작업 공간의 범위가 소프트 한계보다 큰 경우 조인트 위치가 소프트 한계 범위를 벗어날 때 로봇이 작업 공간 안에서 정지할 수 있습니다.