10.5.3.11. RINTA
10.5.3.11. RINTA
목표스텝으로 로봇이 이동 중에 외부의 센서로부터 아날로그 전압이 사용자가 설정한 범위를 만족하면, 인터럽트를 발생시켜 로봇의 이동을 즉각 멈추고, 스텝에 기록된 명령들을 실행한 후, 다음스텝으로 이동합니다.
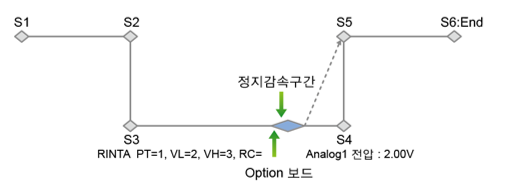
그림 10.11 로봇 인터럽트(아날로그신호)
설명 | 로봇 인터럽트(아날로그신호) | ||
문법 | RINTA PT=<포트번호>, VL=<하한전압>, VH=<상한전압>, RC=<기준치설정>, [X=<기준X>,Y=<기준Y>,Z=<기준Z>] | ||
파라미터 | 포트 번호 | 인터럽트 신호를 받을 아날로그 포트의 번호 | 1~32 |
하한전압 | 아날로그 값이 하한전압과 상한전압 사이이면 인터럽트가 발생. | -10.0~10.0 | |
상한전압 | |||
기준치 설정 | 0이면 일반 로봇인터럽트, 1이면 서치기능 입니다. SEA(서치)기능을 참조하십시오. | 0, 1 | |
기준X, Y, Z | 서치기능일 때 사용됩니다. RC=0이면 무시됩니다. | -3000.0 ~3000.0 | |
사용 예 | RINTA PT=1, VL=2, VH=9, RC=0, X=0, Y=0, Z=0 ←X, Y, Z는 무시 RINTA PT=1, VL=2, VH=9, RC=1, X=1000, Y=2000, Z=3000 | ||