10.5.3.3. MKUCRD
10.5.3.3. MKUCRD
세 개의 포즈로 사용자 좌표계를 생성하는 기능입니다.
설명 | 세 개의(혹은 1개의) 포즈로 사용자 좌표계를 생성하는 기능입니다 | ||
문법 | MKUCRD <좌표계 번호>,<원점포즈>[,<X방향포즈>,<XY평면포즈>] | ||
파라미터 | 좌표계 번호 | 생성할 사용자(User) 좌표계의 번호 | 0~10 |
원점포즈 | 원점에 위치한 포즈 |
| |
X방향포즈 | X축에 위치한 포즈 |
| |
XY평면포즈 | XY 평면에 위치한 포즈 |
| |
사용 예 | MKUCRD 1,P1,P2,P3 MKUCRD 1,P1 (포즈를 1개만 지정하면 포즈의 위치/방향으로 좌표계 지정) | ||
사용자 좌표계는 사용자가 임의의 위치에 좌표계를 설정하여 사용하는 기능이며, 설정된 사용자 좌표계 상에서 수동조작이나 시프트 등의 조작을 할 수 있습니다.또한 스텝의 위치를 사용자 좌표계로 티칭 할 수 있습니다.
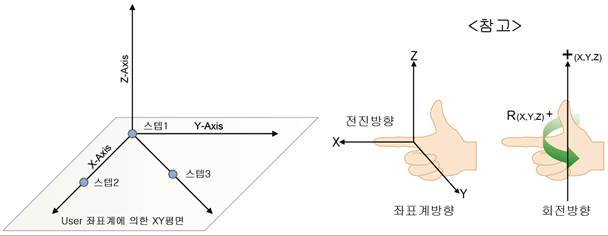
그림 10.7 사용자 좌표계

l 『E1010 티칭된 스텝의 개수 부족』
좌표계 등록을 위한 티칭 프로그램 내에 기록된 step이 3개 미만일 때 발생합니다. 지정한 프로그램 내의 3개의 스텝을 티칭하여 주십시오.
l 『E1011 기록된 점들이 너무 가까움』
좌표계 등록을 위한 teaching 프로그램 내에 기록된 3점간의 거리가 1mm미만일 때 발생하며, 티칭한 스텝을 수정하여 주십시오.
l 『E1012 기록된 점들이 일직선상에 존재』
좌표계 등록을 위한 티칭 프로그램 내에 기록된 3점이 거의 동일 직선상에 존재하여 user 좌표계의 각 축 방향을 결정할 수 없는 경우에 발생, 티칭 프로그램을 확인하여 주십시오.
l 『좌표계, 조그상태 확인 [임의]』
사용자 좌표계 (『[F7]: 조건설정』/『9: 사용자 좌표계 지정』) 선택 시,좌표계가 축 또는 툴 좌표계로 설정되어 있거나,로봇을 JOG 조작 중일 경우에는 사용자 좌표계 선택 및 변경이 불가합니다.