10.5.3.2. CALLPR
10.5.3.2. CALLPR
위치가 서로 다른 2개 이상의 동일 형상의 작업물을 1대의 로봇으로 작업하거나 또는 핸들링 등에서 일련의 착/탈 동작을 여러 번 반복하는 작업의 경우에, 작업 공간내의 여러 곳에서 반복되는 동작이 존재합니다.
이러한 동작이 절대적인 위치와 방향만 다르고 스텝간의 상대적인 위치나 방향은 동일한 경우, 반복되는 동작만을 별도의 프로그램(상대 프로그램)으로 작성한 뒤 이들 동작이 수행될 모든 위치에서 상대프로그램을 호출하여 작업을 수행할 수 있습니다. 이 기능은 프로그램 호출이 이루어진 시점의 현재 위치와 자세를 기준으로 호출된 상대 프로그램을 수행한다는 점에서 단순한 프로그램 호출 기능과는 차이가 있습니다.
다음의 그림은 주(main) 프로그램 1번에서 프로그램 2번을 상대 프로그램 호출하였을 때 실행 결과를 보여주고 있습니다.
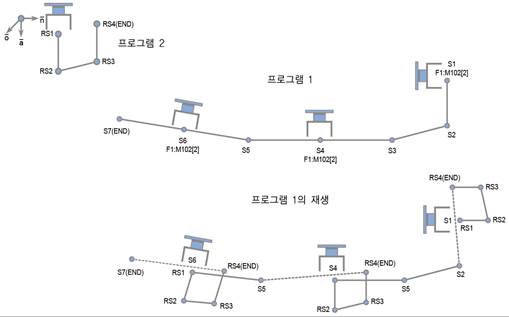
그림 10.6 상대 프로그램 호출
설명 | 상대프로그램 호출(무조건) | ||
문법 | CALLPR <프로그램번호> | ||
파라미터 | 프로그램번호 | 호출할 프로그램의 번호 | 1~9999 |
사용 예 | CALLPR 2 | ||
비고 | 호출된 상대 프로그램의 수행이 완료되면 호출했던 프로그램으로 되돌아와 그 다음 펑션 또는 스텝을 수행합니다. | ||